You might also like
- Design, Care and Feeding of Check Valves by Bob CohenDocument5 pagesDesign, Care and Feeding of Check Valves by Bob CohenvikramchowdaryNo ratings yet
- RR C ChennaiDocument2 pagesRR C ChennaivikramchowdaryNo ratings yet
- MaterialDocument2 pagesMaterialvikramchowdaryNo ratings yet
- Electromagnetic Flowmeter Quotation for IRCO BengaluruDocument2 pagesElectromagnetic Flowmeter Quotation for IRCO BengaluruvikramchowdaryNo ratings yet
- Providing Structural Steel Works for Building ConstructionDocument8 pagesProviding Structural Steel Works for Building ConstructionvikramchowdaryNo ratings yet
- Guide to Check Valve Design, Care and FeedingDocument5 pagesGuide to Check Valve Design, Care and FeedingvikramchowdaryNo ratings yet
- MaterialDocument2 pagesMaterialvikramchowdaryNo ratings yet
- FlowmeterDocument2 pagesFlowmetervikramchowdaryNo ratings yet
- Analysis of FrequenciesDocument3 pagesAnalysis of FrequenciesvikramchowdaryNo ratings yet
- FlowtechDocument2 pagesFlowtechvikramchowdaryNo ratings yet
- Project Name: Project No.: Cart: Ingersoll-Rand Technologies and Services Private LimitedDocument2 pagesProject Name: Project No.: Cart: Ingersoll-Rand Technologies and Services Private LimitedvikramchowdaryNo ratings yet
- Movement ListDocument3 pagesMovement ListvikramchowdaryNo ratings yet
- Indian Income Tax Return AcknowledgementDocument1 pageIndian Income Tax Return AcknowledgementvikramchowdaryNo ratings yet
- 0ff-284 R - ir-GI-piping For Plumbing Work.Document3 pages0ff-284 R - ir-GI-piping For Plumbing Work.vikramchowdaryNo ratings yet
- IR SA Movement - Big GuyDocument2 pagesIR SA Movement - Big GuyvikramchowdaryNo ratings yet
- Government Of Karnataka: S. No. Name of the family member/ಕುಟುಂಬದ Relationship with applicant/ಅ Age/ವಯಸುDocument2 pagesGovernment Of Karnataka: S. No. Name of the family member/ಕುಟುಂಬದ Relationship with applicant/ಅ Age/ವಯಸುvikramchowdaryNo ratings yet
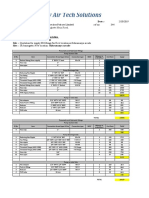
- Air and Electricity Consmuption - FluidsDocument4 pagesAir and Electricity Consmuption - FluidsvikramchowdaryNo ratings yet
- Air and Electricity ConsmuptionDocument4 pagesAir and Electricity ConsmuptionvikramchowdaryNo ratings yet
- PolicySchedule 201110000020700190400000 178852971Document1 pagePolicySchedule 201110000020700190400000 178852971vikramchowdaryNo ratings yet
- 0ff-344 R-IR-ss FittingsDocument3 pages0ff-344 R-IR-ss FittingsvikramchowdaryNo ratings yet
- Air and Electricity ConsmuptionDocument4 pagesAir and Electricity ConsmuptionvikramchowdaryNo ratings yet
- PneumaticsDocument31 pagesPneumaticsvikramchowdaryNo ratings yet
- Vikram's ProfileDocument1 pageVikram's ProfilevikramchowdaryNo ratings yet
- The Oriental Insurance Company LimitedDocument3 pagesThe Oriental Insurance Company LimitedvikramchowdaryNo ratings yet
- Optimizing 3D Printing for Fracture ResistanceDocument3 pagesOptimizing 3D Printing for Fracture ResistancevikramchowdaryNo ratings yet
- GGDocument65 pagesGGFernando RomoNo ratings yet
- JD Safety Gaurd SST Chop Check DecisionMatrixDocument4 pagesJD Safety Gaurd SST Chop Check DecisionMatrixvikramchowdaryNo ratings yet
- How To Send Items Back To Us: Give Us Feedback On Your ReturnDocument3 pagesHow To Send Items Back To Us: Give Us Feedback On Your ReturnvikramchowdaryNo ratings yet
- Eng Training Class 1 Rev1 (Read-Only) PDFDocument84 pagesEng Training Class 1 Rev1 (Read-Only) PDFvikramchowdaryNo ratings yet
- Milroyal D Disc Diaphragm PDFDocument28 pagesMilroyal D Disc Diaphragm PDFvikramchowdaryNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Katalog Menadzer 2013 EnglDocument119 pagesKatalog Menadzer 2013 EnglMarko MiladinovićNo ratings yet
- Dynamometer - 1Document3 pagesDynamometer - 1Vishal BhattNo ratings yet
- Comment To RTDocument32 pagesComment To RTLim Wee BengNo ratings yet
- Solid Mechanics: Amit Sir (M-Tech (STRUCTURE), BE, Diploma in Civil), 7020059691/7385990691Document9 pagesSolid Mechanics: Amit Sir (M-Tech (STRUCTURE), BE, Diploma in Civil), 7020059691/7385990691Nikita GonnadeNo ratings yet
- Limodor: Ventilation According To DIN 18017-3Document16 pagesLimodor: Ventilation According To DIN 18017-3Petar BaricevicNo ratings yet
- Purwoko Arie Sujadi: ExperienceDocument4 pagesPurwoko Arie Sujadi: Experienceeriant014No ratings yet
- Ansys Fluent 14.0: Getting StartedDocument26 pagesAnsys Fluent 14.0: Getting StartedAoife FitzgeraldNo ratings yet
- Daftar Alat TSMDocument2 pagesDaftar Alat TSMagus ImawanNo ratings yet
- Brochure CPR ENDocument8 pagesBrochure CPR ENMakiberNo ratings yet
- Galvanic CorrosionDocument35 pagesGalvanic CorrosionSyarief NahdiNo ratings yet
- A320-25-1BPK R01 Dt. 25.05.21Document39 pagesA320-25-1BPK R01 Dt. 25.05.21Pradeep K sNo ratings yet
- DLC3 Yaris 2016Document3 pagesDLC3 Yaris 2016kurnia wanNo ratings yet
- What is an electrostatic shieldDocument3 pagesWhat is an electrostatic shieldsujaraghupsNo ratings yet
- 253 MA Austenitic - High - Temperature - Grades - Datasheet PDFDocument12 pages253 MA Austenitic - High - Temperature - Grades - Datasheet PDFAbdulNo ratings yet
- Digital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasDocument30 pagesDigital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasPronadeep BoraNo ratings yet
- ROC800-Series IEC 62591 Interface: ScalabilityDocument10 pagesROC800-Series IEC 62591 Interface: ScalabilityBMNo ratings yet
- SHL Learning Resource Center List of Acquired Books for Engineering S.Y. 2012-2016Document27 pagesSHL Learning Resource Center List of Acquired Books for Engineering S.Y. 2012-2016jscansinoNo ratings yet
- STG SiemensDocument2 pagesSTG SiemensjoncperezNo ratings yet
- Soalan Assignment Stm10173Document7 pagesSoalan Assignment Stm10173Razanah RozaimayNo ratings yet
- Siemens Technical FlyerDocument2 pagesSiemens Technical FlyerThiagoPinheiroNo ratings yet
- Basic Driving Instructor CourseDocument9 pagesBasic Driving Instructor CourseRafael AbdullaNo ratings yet
- Evo Controller 8200 IP Configuration KODocument56 pagesEvo Controller 8200 IP Configuration KORogerioNo ratings yet
- Nidek ARK 730 Autorefractometer Service Manual PDFDocument83 pagesNidek ARK 730 Autorefractometer Service Manual PDFPetrica DascaluNo ratings yet
- Gas Stop HTDocument1 pageGas Stop HTbagus918No ratings yet
- Hazardous Area ClassificationDocument15 pagesHazardous Area ClassificationpmnasimNo ratings yet
- 10 Ways To Speed Up Torrent DownloadsDocument5 pages10 Ways To Speed Up Torrent DownloadsricoffanyNo ratings yet
- Machine Tools Questions and Answers - GrindingDocument4 pagesMachine Tools Questions and Answers - GrindingRohit GhulanavarNo ratings yet
- ARM assembly programs for data transfer, arithmetic and logical operationsDocument8 pagesARM assembly programs for data transfer, arithmetic and logical operationsDeepti ChandrasekharanNo ratings yet
- If Steam Drum Under Vacuum Then What Will HappenDocument2 pagesIf Steam Drum Under Vacuum Then What Will HappenyogacruiseNo ratings yet
- TG Tractor Repair Manual Book 5A - Table of Contents: Description Book Number Section Number NumberDocument200 pagesTG Tractor Repair Manual Book 5A - Table of Contents: Description Book Number Section Number NumberJózsef NagyNo ratings yet