You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Project On SamsungDocument39 pagesProject On SamsungAbbas0% (1)
- HT of CO2 Fire ExtinguisherDocument4 pagesHT of CO2 Fire ExtinguisherTapan ChandratreNo ratings yet
- GHS - Liquid (KOH Liquid)Document12 pagesGHS - Liquid (KOH Liquid)Yeniffer Geraldine guerra quispeNo ratings yet
- Pump KnowledgeDocument17 pagesPump Knowledgesmupy_122No ratings yet
- Bernini PDFDocument13 pagesBernini PDFChris AntoniouNo ratings yet
- Non Clogging PumpsDocument15 pagesNon Clogging PumpsSouvik SingharoyNo ratings yet
- SMK BUKIT SENTOSA TINGKATAN 4 PEPERIKSAAN AKHIR TAHUN 2014 MARKING SCHEMEDocument7 pagesSMK BUKIT SENTOSA TINGKATAN 4 PEPERIKSAAN AKHIR TAHUN 2014 MARKING SCHEMEMohd Hairul Akmal Ab. AzizNo ratings yet
- ADX 260 Test One ContentDocument20 pagesADX 260 Test One ContentrainewithaneNo ratings yet
- Berner Air Curtain Installation InstructionsDocument16 pagesBerner Air Curtain Installation InstructionsAldrich ColladoNo ratings yet
- C Terpillar®: D3C, D4C, and D5C Series III Power Shift TransmissionDocument12 pagesC Terpillar®: D3C, D4C, and D5C Series III Power Shift TransmissionAnta MursidikNo ratings yet
- Root Mean Square ValueDocument2 pagesRoot Mean Square ValueProximo DvNo ratings yet
- EndPl MomConn LSDDocument54 pagesEndPl MomConn LSDTony RoseNo ratings yet
- ARM Processor CoreDocument34 pagesARM Processor CorevarshaksNo ratings yet
- Study of Boost Converter With Inverter For Stand Alone Solar ApplicationsDocument25 pagesStudy of Boost Converter With Inverter For Stand Alone Solar Applicationsk rajendraNo ratings yet
- Microsoft Word - Dangerous Goods Declaration PDFDocument1 pageMicrosoft Word - Dangerous Goods Declaration PDFAlfian AnasNo ratings yet
- LCA Training PackageDocument57 pagesLCA Training PackageSilvia PolliniNo ratings yet
- Student Majors ListDocument16 pagesStudent Majors Listbibbi20% (1)
- WordPress For Beginners, The Missing GuideDocument85 pagesWordPress For Beginners, The Missing GuideNicoJulius50% (2)
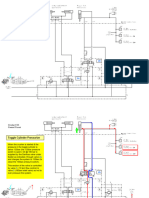
- Toggle Ram - CSS Ram Valve SetupDocument6 pagesToggle Ram - CSS Ram Valve Setupsassine khouryNo ratings yet
- Blasting and Painting ProcedureDocument9 pagesBlasting and Painting Procedureisukuru67% (12)
- FEMA 440 equivalent linearization pushover analysisDocument2 pagesFEMA 440 equivalent linearization pushover analysisAdam JrNo ratings yet
- Biotech. Facility DesignDocument17 pagesBiotech. Facility Designابُوالبَتُول ڈاکٹر صفدر علی قادری رضوی100% (1)
- Resume Electrical Engineer FaizDocument2 pagesResume Electrical Engineer FaizFaizFzNo ratings yet
- Capsule technology overviewDocument5 pagesCapsule technology overviewKazi Nafis UllahNo ratings yet
- 11.11 Practice Set: Review QuestionsDocument3 pages11.11 Practice Set: Review QuestionsBui Nhu100% (1)
- 50-Applicable Codes and StandardsDocument48 pages50-Applicable Codes and StandardsmohsenNo ratings yet
- Curva TD12F - 1000GPM@130PSI - 2950RPMDocument2 pagesCurva TD12F - 1000GPM@130PSI - 2950RPMHenry Hurtado ZeladaNo ratings yet
- ColumnShearCapacity 1Document4 pagesColumnShearCapacity 1Azhar PLNo ratings yet
- Datasheet D042 3010 EN 02Document6 pagesDatasheet D042 3010 EN 02Rycky de la CruzNo ratings yet
- 2012-Tcot-008-S.o.w-001 Rev.2Document150 pages2012-Tcot-008-S.o.w-001 Rev.2denyNo ratings yet