You might also like
- DSP Processors Hit The MainstreamDocument9 pagesDSP Processors Hit The MainstreamGiovani GonzalezNo ratings yet
- Digital Signal Processing ExplainedDocument3 pagesDigital Signal Processing Explaineddrkreddy888No ratings yet
- Bahria University, Karachi Campus: Course: Communication Skills TERM: FALL 2021, Class: Bce-3A Submitted byDocument8 pagesBahria University, Karachi Campus: Course: Communication Skills TERM: FALL 2021, Class: Bce-3A Submitted byMuhammad UmerNo ratings yet
- By Rodger H. Hosking: Reprinted From Vmebus Systems / June 2000Document4 pagesBy Rodger H. Hosking: Reprinted From Vmebus Systems / June 2000Abhilasha MathurNo ratings yet
- AC 1997paper109 PDFDocument8 pagesAC 1997paper109 PDFFranklin Cardeñoso FernándezNo ratings yet
- Introduction to Digital Signal ProcessingDocument24 pagesIntroduction to Digital Signal ProcessingKen MutaiNo ratings yet
- Rtes 6713Document9 pagesRtes 6713Bharath Prabhu PNo ratings yet
- Digi Sign ProcDocument40 pagesDigi Sign Procgkk_143No ratings yet
- DSP-Lab REC-553Document66 pagesDSP-Lab REC-553PraveenNo ratings yet
- Real Time Special Effects Generation AND Noise Filtration OF Audio Signal Using Matlab GUIDocument17 pagesReal Time Special Effects Generation AND Noise Filtration OF Audio Signal Using Matlab GUIAnonymous lVQ83F8mCNo ratings yet
- 4 Choosing The Right DSP Processor: 4.1 Digital Signal ProcessingDocument14 pages4 Choosing The Right DSP Processor: 4.1 Digital Signal ProcessingShavel KumarNo ratings yet
- Tiger SHARC ProcessorDocument35 pagesTiger SHARC ProcessorSurangma ParasharNo ratings yet
- C Algorithms For Real-Time DSP - EMBREEDocument125 pagesC Algorithms For Real-Time DSP - EMBREELuiz Carlos da SilvaNo ratings yet
- Implementation of Frequency Hopping Transceiver On FPGADocument1 pageImplementation of Frequency Hopping Transceiver On FPGAKamran ZiaNo ratings yet
- Introduction To DSPDocument59 pagesIntroduction To DSPSiony BelloNo ratings yet
- Digital Signal Processing PDFDocument25 pagesDigital Signal Processing PDFshadewaveNo ratings yet
- GlmifeDocument3 pagesGlmifeAndrea FasatoNo ratings yet
- Labview DSP Module For Ni Speedy-33 and Ti DsksDocument4 pagesLabview DSP Module For Ni Speedy-33 and Ti DsksJorge MartinezNo ratings yet
- DSP Lab Manual DSK Technical Programming With C, MATLAB Programs 2008 B.Tech ECE IV-I JNTU Hyd V1.9Document52 pagesDSP Lab Manual DSK Technical Programming With C, MATLAB Programs 2008 B.Tech ECE IV-I JNTU Hyd V1.9Chanukya Krishna Chama80% (5)
- DSP Lab - SAMPLE Viva QuestionsDocument8 pagesDSP Lab - SAMPLE Viva Questionsadizz4No ratings yet
- Qex 1Document9 pagesQex 1Aamir HabibNo ratings yet
- Advanced Digital Signal Processing (ADSP) For Decreasing Power DissipationDocument4 pagesAdvanced Digital Signal Processing (ADSP) For Decreasing Power DissipationSindhu V MNo ratings yet
- DSP Definition & How Digital Signal Processing WorksDocument18 pagesDSP Definition & How Digital Signal Processing WorksAnil YarlagaddaNo ratings yet
- DSP Block Diagram Explained with ADC and DAC ImportanceDocument4 pagesDSP Block Diagram Explained with ADC and DAC ImportanceAnil Shrestha100% (3)
- Fpga Implementation of Fir Filter in Signal Processing: AbstractDocument4 pagesFpga Implementation of Fir Filter in Signal Processing: AbstractShafiullaShaikNo ratings yet
- Embedded Radar SignalprocessingDocument3 pagesEmbedded Radar SignalprocessingManikantaReddyNo ratings yet
- Brief Concept of DSPDocument5 pagesBrief Concept of DSPKaren TupinoNo ratings yet
- Digital Signal Processing TutorialsDocument17 pagesDigital Signal Processing TutorialsNikhil PathakNo ratings yet
- Radar Signal Detection Using TMS320C50Document82 pagesRadar Signal Detection Using TMS320C50mgitecetechNo ratings yet
- Digital Signal ProcessingDocument5 pagesDigital Signal ProcessingfiraszekiNo ratings yet
- DSP SmartDocument91 pagesDSP SmartNishanth NissanNo ratings yet
- Igital Ignal Rocessing: at SivagangaiDocument21 pagesIgital Ignal Rocessing: at SivagangaidhivakargunalanNo ratings yet
- Digital Signal Processing PDFDocument6 pagesDigital Signal Processing PDFkarthikeyan0% (1)
- Chapter 1: Introduction: Communication Engineering Video Processing Speech/Audio Processing MedicalDocument4 pagesChapter 1: Introduction: Communication Engineering Video Processing Speech/Audio Processing Medicalluong vyNo ratings yet
- A Beginner's Guide To Programming Digital Audio Effects in The KX Project EnvironmentDocument15 pagesA Beginner's Guide To Programming Digital Audio Effects in The KX Project EnvironmentEsteban BikicNo ratings yet
- DSP Based Electrical Lab: Gokaraju Rangaraju Institute of Engineering & Technology (Autonomous)Document77 pagesDSP Based Electrical Lab: Gokaraju Rangaraju Institute of Engineering & Technology (Autonomous)P Praveen KumarNo ratings yet
- Digital Signal Processing (DSP)Document5 pagesDigital Signal Processing (DSP)abdullahNo ratings yet
- Análisis de Señales - IntroductionDocument32 pagesAnálisis de Señales - IntroductionKeiner Jose Urbina CardenasNo ratings yet
- Lecture - 1 Digital Signal ProcessDocument8 pagesLecture - 1 Digital Signal ProcessSaif AlabdullahNo ratings yet
- RII & RIF FiltersDocument13 pagesRII & RIF FiltersMedab Abd El MalekNo ratings yet
- A Software Tool For Introducing Speech Coding Fundamentals in A DSP CourseDocument10 pagesA Software Tool For Introducing Speech Coding Fundamentals in A DSP CourseSıtkı AkkayaNo ratings yet
- DSP CasestudyDocument23 pagesDSP CasestudyShayani BatabyalNo ratings yet
- ADPCM ImplementationDocument13 pagesADPCM ImplementationDumitru GheorgheNo ratings yet
- Wireless Networking To Support Data and Voice Communication Using Spread Spectrum Technology in The Physical LayerDocument7 pagesWireless Networking To Support Data and Voice Communication Using Spread Spectrum Technology in The Physical LayerbassssssssssssssNo ratings yet
- Audio Effects FinalDocument17 pagesAudio Effects FinalSaurabhPrasadNo ratings yet
- Digital Signal ProcessingDocument271 pagesDigital Signal ProcessingPECMURUGAN100% (3)
- Assignment#01: I. What Is The Motivation For This Work?Document8 pagesAssignment#01: I. What Is The Motivation For This Work?hamza shahbazNo ratings yet
- Multiplier Accumulator ProjectDocument5 pagesMultiplier Accumulator Projectue06037No ratings yet
- DSP Lab 1Document3 pagesDSP Lab 1Anonymous PfQKLcTtNo ratings yet
- Multimedia Data Formats and ConversionDocument27 pagesMultimedia Data Formats and Conversionمصطفي فتحي أبوالعزمNo ratings yet
- Introduction To DSP ProcessorsDocument15 pagesIntroduction To DSP ProcessorsParesh SawantNo ratings yet
- Tiger SHARC ProcessorDocument36 pagesTiger SHARC ProcessorChintan PatelNo ratings yet
- Assembly Language ProgrammingDocument85 pagesAssembly Language ProgrammingsandeepaprNo ratings yet
- Digital Signal ProcessingDocument6 pagesDigital Signal ProcessingNemanja StevanovićNo ratings yet
- Seminar Report DSPDocument34 pagesSeminar Report DSPwmallanNo ratings yet
- Digital Signal Processing: A Practical Guide for Engineers and ScientistsFrom EverandDigital Signal Processing: A Practical Guide for Engineers and ScientistsRating: 4.5 out of 5 stars4.5/5 (7)
- Digital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingFrom EverandDigital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingRating: 5 out of 5 stars5/5 (1)
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Tutorial On Static Var Compensators: Presented byDocument65 pagesTutorial On Static Var Compensators: Presented byKham KhaNo ratings yet
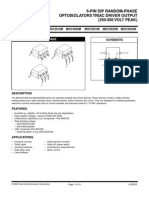
- MOC3021Document10 pagesMOC3021RamonNo ratings yet
- D7529 enDocument4 pagesD7529 enKham KhaNo ratings yet
- Tieng Anh On TapDocument16 pagesTieng Anh On TapKham KhaNo ratings yet
- Ethical ControlDocument28 pagesEthical ControlLani Derez100% (1)
- Sweet Emotion: Bass Line ForDocument2 pagesSweet Emotion: Bass Line ForJames Gale100% (1)
- Firewalker Spell and Ability GuideDocument2 pagesFirewalker Spell and Ability GuideRon Van 't VeerNo ratings yet
- Hold-Up?" As He Simultaneously Grabbed The Firearm of Verzosa. WhenDocument2 pagesHold-Up?" As He Simultaneously Grabbed The Firearm of Verzosa. WhenVener MargalloNo ratings yet
- Types, Shapes and MarginsDocument10 pagesTypes, Shapes and MarginsAkhil KanukulaNo ratings yet
- History I.M.PeiDocument26 pagesHistory I.M.PeiVedasri RachaNo ratings yet
- MEPQ7202 Security OfficerDocument55 pagesMEPQ7202 Security OfficerSALMANNo ratings yet
- Art 1207-1257 CCDocument5 pagesArt 1207-1257 CCRubz JeanNo ratings yet
- Whole Brain Lesson Plan: 3 QuarterDocument5 pagesWhole Brain Lesson Plan: 3 QuarterNieve Marie Cerezo100% (1)
- Unit 20: Where Is Sapa: 2.look, Read and CompleteDocument4 pagesUnit 20: Where Is Sapa: 2.look, Read and CompleteNguyenThuyDungNo ratings yet
- Descartes' Logarithmic Spiral ExplainedDocument8 pagesDescartes' Logarithmic Spiral Explainedcyberboy_875584No ratings yet
- SSC CGL Tier 2 Quantitative Abilities 16-Nov-2020Document17 pagesSSC CGL Tier 2 Quantitative Abilities 16-Nov-2020aNo ratings yet
- Reading Comprehension Animals Copyright English Created Resources PDFDocument10 pagesReading Comprehension Animals Copyright English Created Resources PDFCasillas ElNo ratings yet
- Fish Feed Composition and ProductionDocument54 pagesFish Feed Composition and ProductionhaniffNo ratings yet
- Explorations - An Introduction To Astronomy-HighlightsDocument10 pagesExplorations - An Introduction To Astronomy-HighlightsTricia Rose KnousNo ratings yet
- Deep Work Book - English ResumoDocument9 pagesDeep Work Book - English ResumoJoão Pedro OnozatoNo ratings yet
- Conduct effective meetings with the right typeDocument5 pagesConduct effective meetings with the right typeRio AlbaricoNo ratings yet
- Integrative Paper Unfolding The SelfDocument11 pagesIntegrative Paper Unfolding The SelfTrentox XXXNo ratings yet
- SOP For Storage of Temperature Sensitive Raw MaterialsDocument3 pagesSOP For Storage of Temperature Sensitive Raw MaterialsSolomonNo ratings yet
- 1603 Physics Paper With Ans Sol EveningDocument8 pages1603 Physics Paper With Ans Sol EveningRahul RaiNo ratings yet
- A To Z of Architecture PDFDocument403 pagesA To Z of Architecture PDFfaizan100% (1)
- Yoga For The Primary Prevention of Cardiovascular Disease (Hartley 2014)Document52 pagesYoga For The Primary Prevention of Cardiovascular Disease (Hartley 2014)Marcelo NorisNo ratings yet
- MICROHARDNESS TESTER HMV-2 - SeriesDocument9 pagesMICROHARDNESS TESTER HMV-2 - SeriesRicoNo ratings yet
- Chemistry The Molecular Science 5th Edition Moore Solutions Manual 1Document36 pagesChemistry The Molecular Science 5th Edition Moore Solutions Manual 1josephandersonxqwbynfjzk100% (27)
- GO vs. CA Case DigestDocument1 pageGO vs. CA Case Digestunbeatable38100% (4)
- Le Nu Spa Employee HandbookDocument34 pagesLe Nu Spa Employee Handbookhamzeh abo hammourNo ratings yet
- Failure CountersDocument28 pagesFailure CountersБотирали АзибаевNo ratings yet
- City of Manila vs. Hon CaridadDocument2 pagesCity of Manila vs. Hon CaridadkelbingeNo ratings yet
- MA KP3-V2H-2 enDocument155 pagesMA KP3-V2H-2 enJavier MiramontesNo ratings yet