You might also like
- Thyagharajan 2018Document28 pagesThyagharajan 2018David Ivan Sánchez ChávezNo ratings yet
- Saleem 2021Document39 pagesSaleem 2021David Ivan Sánchez ChávezNo ratings yet
- Sensors 15 09681 v2Document22 pagesSensors 15 09681 v2David Ivan Sánchez ChávezNo ratings yet
- Prof Simon Blackmore PresentationDocument30 pagesProf Simon Blackmore PresentationDavid Ivan Sánchez ChávezNo ratings yet
- Farm of The FutureDocument1 pageFarm of The Futurecristian_iacomi3416No ratings yet
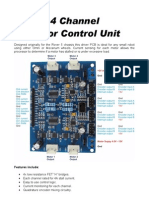
- 4 Channel Instruction ManualDocument2 pages4 Channel Instruction ManualVarun Singh ChandelNo ratings yet
- What She SaidDocument2 pagesWhat She SaidDavid Ivan Sánchez ChávezNo ratings yet
- What She SaidDocument2 pagesWhat She SaidDavid Ivan Sánchez ChávezNo ratings yet
- Black DogDocument7 pagesBlack DogDavid Ivan Sánchez ChávezNo ratings yet
- Hey Bulldog Chord ProgressionDocument1 pageHey Bulldog Chord ProgressionDavid Ivan Sánchez Chávez100% (1)
- 8 DaysDocument1 page8 DaysDavid Ivan Sánchez ChávezNo ratings yet
- CHAYOTE STARCH ISOLATIONDocument10 pagesCHAYOTE STARCH ISOLATIONDavid Ivan Sánchez ChávezNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Neural networks: Advanced techniques for image processing (CNNs and GANsDocument6 pagesNeural networks: Advanced techniques for image processing (CNNs and GANsWelluzani MandaNo ratings yet
- Final ExamFil 101Document5 pagesFinal ExamFil 101Misha ClaireNo ratings yet
- Acknowledgment: Communication Skills, Which Also Helped Me in Doing A LotDocument6 pagesAcknowledgment: Communication Skills, Which Also Helped Me in Doing A LotVinayak SainiNo ratings yet
- Brand Strategy ExerciseDocument35 pagesBrand Strategy ExerciseAarti AhirwarNo ratings yet
- Self-Regulation Strategies - : Methods For Managing MyselfDocument2 pagesSelf-Regulation Strategies - : Methods For Managing MyselfTherese JoseNo ratings yet
- Econtent Module Epsc 223 PDFDocument169 pagesEcontent Module Epsc 223 PDFjoeNo ratings yet
- EPC4.Reflective ReadingDocument11 pagesEPC4.Reflective ReadingArshya Fatima0% (1)
- Primary Source Essay TwoDocument2 pagesPrimary Source Essay TwoRobert MartinNo ratings yet
- 18 Utilize Specialized Communication SkillsDocument10 pages18 Utilize Specialized Communication SkillsAlemnew SisayNo ratings yet
- Robber's Cave ExperimentDocument2 pagesRobber's Cave Experimentzuzu_zuzu96No ratings yet
- MemoryDocument60 pagesMemoryuetlahore100% (2)
- Linguistics & PhilologyDocument11 pagesLinguistics & PhilologyH Janardan Prabhu100% (1)
- SelfDocument6 pagesSelfJohn JovonovichNo ratings yet
- Eed 114Document5 pagesEed 114Laiza Limpag EgloriaNo ratings yet
- December 5-9Document3 pagesDecember 5-9ronaliza c. cerdenolaNo ratings yet
- Computerized Decision Making KevinDocument7 pagesComputerized Decision Making KevinKevinDennison100% (4)
- Jim Cummins' Linguistic Interdependence TheoryDocument7 pagesJim Cummins' Linguistic Interdependence TheoryRICHARD GUANZONNo ratings yet
- CLIL Motivation With Cooperative LearningDocument5 pagesCLIL Motivation With Cooperative LearningLenkaNo ratings yet
- Language Curriculum Design and Socialisation, by Peter Mickan, Multilingual Matters, 2013, 133 PP., $1,583.52 (Hardcover), ISBN 987-1-84769-829-2Document4 pagesLanguage Curriculum Design and Socialisation, by Peter Mickan, Multilingual Matters, 2013, 133 PP., $1,583.52 (Hardcover), ISBN 987-1-84769-829-2Asep SuparmanNo ratings yet
- Neilson Heuristic PrinciplesDocument20 pagesNeilson Heuristic PrinciplesRahat BatoolNo ratings yet
- Bachelor of Science in Psychology: Program Curriculum Ay 2020 - 2021Document4 pagesBachelor of Science in Psychology: Program Curriculum Ay 2020 - 2021AZGH HOSPITAL /Cyberdyne PhilippinesNo ratings yet
- The Picture of Dorian GrayDocument3 pagesThe Picture of Dorian GrayJorge Iván López BernalNo ratings yet
- An Overview of Foresight Methodologies 1Document10 pagesAn Overview of Foresight Methodologies 1Anuta CostinelNo ratings yet
- How Language Shape The Way We ThinkDocument4 pagesHow Language Shape The Way We ThinkDaniel SolomonNo ratings yet
- 1 Answer Key A Grammar, Vocabulary, and PronunciationDocument6 pages1 Answer Key A Grammar, Vocabulary, and PronunciationtuizfagmtNo ratings yet
- WWII Poster RubricDocument1 pageWWII Poster Rubricsteven_e_kleinNo ratings yet
- Multiple Intelligences PDFDocument170 pagesMultiple Intelligences PDFalida100% (5)
- Constructivism and First Language AcquisitionDocument2 pagesConstructivism and First Language AcquisitionÖzgee Özdemir100% (3)
- Developing Community Competence Through The Work Group ApproachDocument5 pagesDeveloping Community Competence Through The Work Group Approachanon_441576266No ratings yet
- CS 636 Reading List and Presentation ScheduleDocument3 pagesCS 636 Reading List and Presentation ScheduleAhmed AnasNo ratings yet