You might also like
- Reinforced ConcreteDocument13 pagesReinforced ConcreteRenukadevi Rpt17% (18)
- Unit 6Document13 pagesUnit 6VeronicaNo ratings yet
- Lg938l - Operation & Maintenance ManualDocument114 pagesLg938l - Operation & Maintenance ManualMuhammad Nadim MakhlufNo ratings yet
- IEEE STD C37.30.1 Estandar de Requisitos para Interruptores de Aire de AV AC para Nivelesmayores A 1000VDocument104 pagesIEEE STD C37.30.1 Estandar de Requisitos para Interruptores de Aire de AV AC para Nivelesmayores A 1000Valex100% (4)
- Modernize Customer Service with a Cloud-Based Contact CenterDocument11 pagesModernize Customer Service with a Cloud-Based Contact CenterMishNo ratings yet
- Branch and BoundDocument30 pagesBranch and BoundPriyabrata MishraNo ratings yet
- MODULE IV - Branch and BoundDocument5 pagesMODULE IV - Branch and BoundRaji PillaiNo ratings yet
- Branch and BoundDocument21 pagesBranch and Boundbhadiv612No ratings yet
- Unit 5 JwfilesDocument15 pagesUnit 5 JwfilesvenugopalNo ratings yet
- Fourth Module SecondDocument14 pagesFourth Module SecondShobhith AugustineNo ratings yet
- Unit 5 Branch and Bound - The MethodDocument15 pagesUnit 5 Branch and Bound - The MethodSeravana KumarNo ratings yet
- Modified by Dr. ISSAM ALHADID 1/4/2019Document26 pagesModified by Dr. ISSAM ALHADID 1/4/2019ISSAM HAMADNo ratings yet
- Cs 301 Quiz No 2 FileDocument32 pagesCs 301 Quiz No 2 FileMuhammad ahzamNo ratings yet
- Artificial IntelligenceDocument18 pagesArtificial IntelligenceAlima NasaNo ratings yet
- Unit - V: Branch and Bound - The MethodDocument18 pagesUnit - V: Branch and Bound - The Methodmansha99No ratings yet
- Unit II NotesDocument28 pagesUnit II NotesHatersNo ratings yet
- Characteristics of good algorithmsDocument15 pagesCharacteristics of good algorithmsBibek SubediNo ratings yet
- Fib HeapsDocument7 pagesFib Heapsapi-3825559100% (1)
- UntitledDocument15 pagesUntitledBibek SubediNo ratings yet
- Branch and BoundDocument10 pagesBranch and BoundSahil KNo ratings yet
- Data Structure McqsDocument18 pagesData Structure McqsRizwan AliNo ratings yet
- Informed Search AlgorithmsDocument12 pagesInformed Search AlgorithmsphaniNo ratings yet
- Describe The Following: Fibonacci Heaps Binomial HeapsDocument13 pagesDescribe The Following: Fibonacci Heaps Binomial HeapsAshay SawantNo ratings yet
- Ai NotesDocument13 pagesAi NotesHitesh MahiNo ratings yet
- Ignou Mcs 031 Solved PaperDocument7 pagesIgnou Mcs 031 Solved PaperGaurav Sood0% (2)
- AI Lec2Document43 pagesAI Lec2Asil Zulfiqar 4459-FBAS/BSCS4/F21No ratings yet
- Finding Optimal Path: By: Dr. Anjali DiwanDocument40 pagesFinding Optimal Path: By: Dr. Anjali DiwanPaulos KNo ratings yet
- Finding Optimal Path: By: Dr. Anjali DiwanDocument35 pagesFinding Optimal Path: By: Dr. Anjali DiwanPaulos KNo ratings yet
- Root Finding Methods - Bisection vs. Newton Problem and DescriptionDocument4 pagesRoot Finding Methods - Bisection vs. Newton Problem and DescriptionDonald NpNo ratings yet
- Vet. AssignmentDocument16 pagesVet. AssignmentAbdulsamadNo ratings yet
- Chapter 2-AIDocument26 pagesChapter 2-AIjajara5519No ratings yet
- Midterm SolutionDocument7 pagesMidterm Solutionsunnyak47No ratings yet
- Data Structures Algorithms Branch Bound MethodsDocument44 pagesData Structures Algorithms Branch Bound MethodsJit AggNo ratings yet
- Shayantan Kabiraj Company TarDocument12 pagesShayantan Kabiraj Company Tar22Shayantan KabirajNo ratings yet
- Bisecstional MethodDocument3 pagesBisecstional MethodRayhan KhanNo ratings yet
- hw06 Solution PDFDocument7 pageshw06 Solution PDFsiddharth1kNo ratings yet
- Mca-4 MC0080 IDocument15 pagesMca-4 MC0080 ISriram ChakrapaniNo ratings yet
- A Star AlgoDocument78 pagesA Star Algojiminisinbts02No ratings yet
- MC0080 - Analysis and Design of AlgorithmsDocument11 pagesMC0080 - Analysis and Design of AlgorithmsHarvinder SinghNo ratings yet
- Think Globally, Act Locally: Evolutionary SearchDocument26 pagesThink Globally, Act Locally: Evolutionary Searchproteas26No ratings yet
- Informed Search AlgorithmsDocument16 pagesInformed Search AlgorithmsPriyansh GuptaNo ratings yet
- Informed Search AI MID2 Unit 2Document8 pagesInformed Search AI MID2 Unit 2ks.umashankerNo ratings yet
- Recursive Binary Tree TraversalDocument16 pagesRecursive Binary Tree TraversalGerald KapinguraNo ratings yet
- AI Search AlgorithmDocument38 pagesAI Search AlgorithmRajat KumarNo ratings yet
- Learning Complex Boolean Functions: Algorithms and ApplicationsDocument8 pagesLearning Complex Boolean Functions: Algorithms and ApplicationsMario Betanzos UnamNo ratings yet
- H170227e Vimbainashe Chigumbu Daa-3Document8 pagesH170227e Vimbainashe Chigumbu Daa-3Vimbainashe ChigumbuNo ratings yet
- CS1FC16 ALGORITHMS IntroductionDocument7 pagesCS1FC16 ALGORITHMS IntroductionAnna AbcxyzNo ratings yet
- Daa Unit 3Document91 pagesDaa Unit 3Abhishek FfNo ratings yet
- BST 4Document7 pagesBST 4Tanya VermaNo ratings yet
- CS213: Data Structures and Algorithms Shortest Path to Ghastly CheckpointDocument4 pagesCS213: Data Structures and Algorithms Shortest Path to Ghastly Checkpointarvind muraliNo ratings yet
- Amina Parveen: Assignment#4 Data StructuresDocument24 pagesAmina Parveen: Assignment#4 Data StructuresFarid KhanNo ratings yet
- Astar TutorialDocument5 pagesAstar Tutorialayesha_khan963No ratings yet
- Branch and Bound Optimization AlgorithmDocument7 pagesBranch and Bound Optimization AlgorithmRidhima Amit KhamesraNo ratings yet
- Algorithms Question BankDocument15 pagesAlgorithms Question BankPablo AhmedNo ratings yet
- Quick Sort Algorithm and Complexity AnalysisDocument32 pagesQuick Sort Algorithm and Complexity AnalysisYashaswi Srivastava100% (1)
- F (X) Cosh (X) Cos (X) 1Document3 pagesF (X) Cosh (X) Cos (X) 1Getachew FentawNo ratings yet
- unit-2 branch and bound techniquesDocument7 pagesunit-2 branch and bound techniquesanshul.saini0803No ratings yet
- IBM Coding Questions With Answers 2024Document13 pagesIBM Coding Questions With Answers 2024Dudekula RahamathullaNo ratings yet
- Branch and BoundDocument6 pagesBranch and Boundsantosh.parsaNo ratings yet
- Artificial Intelligence - Random k-SAT problem generator and solverDocument20 pagesArtificial Intelligence - Random k-SAT problem generator and solvermahek saliaNo ratings yet
- Unit 5Document33 pagesUnit 5Sushmita SharmaNo ratings yet
- BFS and DFS-4Document27 pagesBFS and DFS-4Anushka SharmaNo ratings yet
- Efficient Similarity Search in Sequence DatabasesDocument16 pagesEfficient Similarity Search in Sequence DatabasesNontas TheosNo ratings yet
- Math Report on Reliable Equation Solver My_fzeroDocument39 pagesMath Report on Reliable Equation Solver My_fzerolapuNo ratings yet
- How To Install GmtsarDocument24 pagesHow To Install GmtsardedetmixNo ratings yet
- Smarter and Safer: Cordless Endodontic HandpieceDocument2 pagesSmarter and Safer: Cordless Endodontic Handpiecesonu1296No ratings yet
- VisiLogic Software Manual-LadderDocument158 pagesVisiLogic Software Manual-LadderEduardo Vasquez CastroNo ratings yet
- Diffraction of Laser Beam Using Wire Mesh, Cross Wire and GratingDocument2 pagesDiffraction of Laser Beam Using Wire Mesh, Cross Wire and GratingPriyesh PandeyNo ratings yet
- Inventory Management PreetDocument28 pagesInventory Management PreetKawalpreet Singh MakkarNo ratings yet
- Using Electricity SafelyDocument1 pageUsing Electricity SafelymariaNo ratings yet
- Osha 1926.452Document14 pagesOsha 1926.452Binoy GopinathanNo ratings yet
- Wireless Mouse m325 Quick Start GuideDocument2 pagesWireless Mouse m325 Quick Start GuideFabolos 9No ratings yet
- Application of PLC and SCADA in Auto-Control Systems For Silo Grain HandlingDocument4 pagesApplication of PLC and SCADA in Auto-Control Systems For Silo Grain Handlingshahid_scribdNo ratings yet
- Demographically Similar EntriesDocument1 pageDemographically Similar EntriesTahsildar MydukurNo ratings yet
- VDP08 Technical CatalogueDocument47 pagesVDP08 Technical CatalogueAdal VeraNo ratings yet
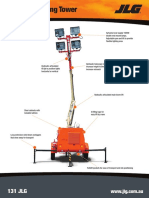
- JLG Lighting Tower 6308AN Series II 20150907Document2 pagesJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09No ratings yet
- List of Projects Related To Transportation Highway and BridgesDocument5 pagesList of Projects Related To Transportation Highway and BridgesOyedotun TundeNo ratings yet
- Hit-Re 500 With Hit-V Has RodsDocument3 pagesHit-Re 500 With Hit-V Has RodsMKNo ratings yet
- Apache Oozie - A workflow scheduler to manage Hadoop jobsDocument5 pagesApache Oozie - A workflow scheduler to manage Hadoop jobsarjuncchaudharyNo ratings yet
- Stokes' theorem simplifies integration of differential formsDocument6 pagesStokes' theorem simplifies integration of differential formssiriusgrNo ratings yet
- Fem Question PaperDocument4 pagesFem Question PaperARSNo ratings yet
- Saint Gobain - CertainTeed Roofing ShinglesDocument14 pagesSaint Gobain - CertainTeed Roofing ShinglesJagriti KashyapNo ratings yet
- Alketerge EDocument4 pagesAlketerge EYohanes OktavianusNo ratings yet
- W 7570 enDocument276 pagesW 7570 enthedoors89No ratings yet
- J 1 B 1211 CCDDocument3 pagesJ 1 B 1211 CCDRegion 51No ratings yet
- Iraqi Code for Reinforced Concrete StructuresDocument71 pagesIraqi Code for Reinforced Concrete Structuresmamandawe50% (2)
- Ashrae - 2009 I-P - F09 - AddDocument2 pagesAshrae - 2009 I-P - F09 - AddSergio SemmNo ratings yet
- 2014 Solder Joint ReliabilityDocument18 pages2014 Solder Joint ReliabilitychoprahariNo ratings yet
- AS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsDocument1 pageAS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsAlex Zambrana RodríguezNo ratings yet