You might also like
- CREATING TIME DELAYS AND DATA TRANSFER BETWEEN CONTROLLERSDocument7 pagesCREATING TIME DELAYS AND DATA TRANSFER BETWEEN CONTROLLERSPrerna Sanjivan MhatreNo ratings yet
- 825482C54Document4 pages825482C54Anonymous lubWipsrWNo ratings yet
- Using The I2C Bus ELP 305: Design and System Laboratory: 1. ObjectiveDocument9 pagesUsing The I2C Bus ELP 305: Design and System Laboratory: 1. ObjectiveSamarthNo ratings yet
- PLC Basicsand Ladder Programming-2Document86 pagesPLC Basicsand Ladder Programming-2Ifradmanorama Papabeta2611No ratings yet
- Exp.4 PLC Timers and CountersDocument5 pagesExp.4 PLC Timers and CountersELaine Dichosa50% (4)
- HC-SR04 ultrasonic range sensor module tutorialDocument4 pagesHC-SR04 ultrasonic range sensor module tutorialLe ZueroNo ratings yet
- Ladder Diagram Timer and Counter: PLT 307 - Programmable Logic ControllerDocument18 pagesLadder Diagram Timer and Counter: PLT 307 - Programmable Logic Controllerbeselamu0% (1)
- Lecture 12 8051 Timer Programing v2Document22 pagesLecture 12 8051 Timer Programing v2Faisal Bin Abdur Rahman 1912038642No ratings yet
- 99 000 RPM Contact Less Digital TachometerDocument11 pages99 000 RPM Contact Less Digital TachometerHemanth Kumar K SNo ratings yet
- Raewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An OutputDocument6 pagesRaewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An Outputpatil_555No ratings yet
- MPBES Lab 6Document3 pagesMPBES Lab 6ahmedNo ratings yet
- Unit 4 16marksDocument12 pagesUnit 4 16markssramalingam288953No ratings yet
- Programmable Logic Controller (PLC) FundamentalsDocument36 pagesProgrammable Logic Controller (PLC) FundamentalsAbhishek SoniNo ratings yet
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77No ratings yet
- Timers and Counters Are So Important That You Will Find Many Examples Throughout This Tutorial SeriesDocument2 pagesTimers and Counters Are So Important That You Will Find Many Examples Throughout This Tutorial SeriesAndrei Linca-TorjeNo ratings yet
- NFE2159 Assignment Brief 17-18 Embedded SystemDocument11 pagesNFE2159 Assignment Brief 17-18 Embedded SystemShaikh Bilal Mehmood0% (1)
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocument8 pagesAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNo ratings yet
- Micro Controller Based Digital Clock With CalendarDocument8 pagesMicro Controller Based Digital Clock With CalendarPratyay Dhar33% (3)
- Nios-Ii and Timer: I. ObjectiveDocument15 pagesNios-Ii and Timer: I. ObjectiveVõ Quang Thanh NghĩaNo ratings yet
- PLC Report Wong Shin Chien 0317415Document23 pagesPLC Report Wong Shin Chien 0317415ShinChienNo ratings yet
- TIMER Radovan RabrenovicDocument15 pagesTIMER Radovan RabrenovicRadovan RabrenovicNo ratings yet
- Micro Controller Based School TimerDocument5 pagesMicro Controller Based School Timera_kureelNo ratings yet
- IADocument9 pagesIAVipul SharmaNo ratings yet
- PWM ControlDocument28 pagesPWM ControlAgus Lesmana100% (2)
- TMS320F2812 - Event ManagerDocument52 pagesTMS320F2812 - Event ManagerPantech ProLabs India Pvt LtdNo ratings yet
- Micro Controller Lab 3Document11 pagesMicro Controller Lab 3Talk Shows CentreNo ratings yet
- UNIT_3 (1)Document62 pagesUNIT_3 (1)sreekar723No ratings yet
- PLC Lab ManualDocument28 pagesPLC Lab ManualrkNo ratings yet
- Computational Robotics Engineering: Timers and InterruptsDocument8 pagesComputational Robotics Engineering: Timers and InterruptsMarcos TrejoNo ratings yet
- Direct Memory AccessDocument6 pagesDirect Memory AccessPratik SandilyaNo ratings yet
- Installation and operation guide for Series One Junior PCDocument29 pagesInstallation and operation guide for Series One Junior PCJuvenal G. C. GallardoNo ratings yet
- UM Stop Watch Program Using 68000 Assembly LanguageDocument11 pagesUM Stop Watch Program Using 68000 Assembly LanguageGeoffrey ChuaNo ratings yet
- Experiment #6 Input / Output DesignDocument11 pagesExperiment #6 Input / Output DesignFelipe DiasNo ratings yet
- PLC Lab #4 Event SequencingDocument15 pagesPLC Lab #4 Event SequencingIan SpacekNo ratings yet
- 7led DiceDocument8 pages7led DiceMthokozisi Jet NgcoboNo ratings yet
- 1-Architecture of 8085Document34 pages1-Architecture of 8085Pinki KumariNo ratings yet
- Project Report Digital Clock System: Digital Logic and Design - 3-BDocument17 pagesProject Report Digital Clock System: Digital Logic and Design - 3-BFAHAD ASADNo ratings yet
- TTL Digital ClockDocument5 pagesTTL Digital Clockyampire100% (1)
- Objective: RTC: User at The Client Location Need To Set Time For The IncrementingDocument3 pagesObjective: RTC: User at The Client Location Need To Set Time For The IncrementingyNo ratings yet
- STM32 Timers 5.haftaDocument25 pagesSTM32 Timers 5.haftagorgulu buzNo ratings yet
- PLC Lab ManualDocument34 pagesPLC Lab ManualDhiraj maliNo ratings yet
- Ldcs MaterialDocument14 pagesLdcs MaterialMangaiyarkarasi VengatachalamNo ratings yet
- PLC Full ReportDocument10 pagesPLC Full ReportJian Jie0% (1)
- IR TachometerDocument10 pagesIR TachometerMohammed Abdulrahman MossaNo ratings yet
- MSP430 Timers and PWMDocument13 pagesMSP430 Timers and PWManhhungkenNo ratings yet
- Ee446 Embedded Systems Lab #01: InstructionsDocument4 pagesEe446 Embedded Systems Lab #01: InstructionsMuhammad ShafeeqNo ratings yet
- Setup and Use The AVR® TimersDocument16 pagesSetup and Use The AVR® Timersmike_helplineNo ratings yet
- Regloplas RT50 Controller Manual PDFDocument28 pagesRegloplas RT50 Controller Manual PDFalso strong and durableNo ratings yet
- Micro Controller Washing Machine TimerDocument40 pagesMicro Controller Washing Machine TimerArjun Pratap Singh85% (20)
- Digital ClockDocument34 pagesDigital ClockAkanksha Verma50% (2)
- 8254 Programmable Interval TimerDocument4 pages8254 Programmable Interval Timerapi-26100966100% (1)
- American International University-Bangladesh (AIUB) Faculty of EngineeringDocument5 pagesAmerican International University-Bangladesh (AIUB) Faculty of Engineeringsaikat ghoshNo ratings yet
- DC Motor Speed ControlDocument5 pagesDC Motor Speed ControlAnita WulansariNo ratings yet
- Chapter SevenDocument43 pagesChapter SevenNaho Senay IINo ratings yet
- 04 Delays, Counters, and TimersDocument47 pages04 Delays, Counters, and TimersFatimaAlarconBlancoNo ratings yet
- Lab 1+2 Timer and StopwatchDocument14 pagesLab 1+2 Timer and StopwatchMuhd Ikram ShabryNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- PAI Industries, Inc. - Catalog Polea de MotorDocument2 pagesPAI Industries, Inc. - Catalog Polea de MotorAlexis ValleNo ratings yet
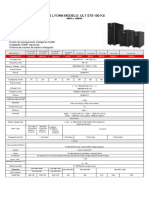
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNo ratings yet
- IGCSE Chemistry TEST YOUR SELF CHAPTER 4Document12 pagesIGCSE Chemistry TEST YOUR SELF CHAPTER 4Nguyễn Việt Huy RoyNo ratings yet
- High Performance Techniques For Microsoft SQL Server PDFDocument307 pagesHigh Performance Techniques For Microsoft SQL Server PDFmaghnus100% (1)
- The Nature of Philosophy and Its ObjectsDocument9 pagesThe Nature of Philosophy and Its Objectsaugustine abellanaNo ratings yet
- Control Charts For Lognormal DataDocument7 pagesControl Charts For Lognormal Dataanjo0225No ratings yet
- Hkts 210 Sub/Hkts 200 Sub: SubwooferDocument6 pagesHkts 210 Sub/Hkts 200 Sub: SubwooferDan PopNo ratings yet
- IO SystemDocument32 pagesIO Systemnanekaraditya06No ratings yet
- Land Based SensorsDocument40 pagesLand Based SensorsJ.MichaelLooneyNo ratings yet
- PLC Omron BasicDocument19 pagesPLC Omron BasicnorbipmmNo ratings yet
- Holiday Assignment XDocument2 pagesHoliday Assignment XMonis ShaikhNo ratings yet
- Active FilterDocument16 pagesActive FilterRam SankarNo ratings yet
- Final EstimateDocument60 pagesFinal EstimateChristian Paulo Cardinal TungolNo ratings yet
- Section 1Document28 pagesSection 1Sonia KaurNo ratings yet
- Beyond SVGFDocument66 pagesBeyond SVGFLiliana QueiroloNo ratings yet
- Open Die ForgingDocument7 pagesOpen Die ForgingCharanjeet Singh0% (1)
- Lab 2 ECADocument7 pagesLab 2 ECAAizan AhmedNo ratings yet
- Libro de FLOTACIÓN-101-150 PDFDocument50 pagesLibro de FLOTACIÓN-101-150 PDFIsaias Viscarra HuizaNo ratings yet
- Brochure Innerynx Mechanical SealsDocument12 pagesBrochure Innerynx Mechanical SealsErivelton ScaldelaiNo ratings yet
- Principios Básicos para El Diseño de Instalaciones de Bombas CentrífugasDocument392 pagesPrincipios Básicos para El Diseño de Instalaciones de Bombas CentrífugasChristian Vargas94% (16)
- Mechanical Properties ExplainedDocument38 pagesMechanical Properties ExplainedJamaica VelascoNo ratings yet
- Insight: Mini C-Arm Imaging System Technical Reference ManualDocument21 pagesInsight: Mini C-Arm Imaging System Technical Reference ManualTyrone CoxNo ratings yet
- American Journal of Sociology Volume 46 Issue 3 1940 (Doi 10.2307/2769572) C. Wright Mills - Methodological Consequences of The Sociology of KnowledgeDocument16 pagesAmerican Journal of Sociology Volume 46 Issue 3 1940 (Doi 10.2307/2769572) C. Wright Mills - Methodological Consequences of The Sociology of KnowledgeBobi BadarevskiNo ratings yet
- Solutions: Rise Desnita, M.Si., AptDocument41 pagesSolutions: Rise Desnita, M.Si., Aptdeput_rprNo ratings yet
- Manual Fx2n 485 BDDocument8 pagesManual Fx2n 485 BDaxo_vfrNo ratings yet
- Lecturer Notes On Pipe Sizing BasicsDocument32 pagesLecturer Notes On Pipe Sizing BasicsTactical Blackhawk BatamNo ratings yet
- Hydrogen in 1 ShotDocument86 pagesHydrogen in 1 ShotSaloum Muhammed Islam0% (1)
- 925E II 24 PG A4 Broch - 12 - 2020 - DCECDocument13 pages925E II 24 PG A4 Broch - 12 - 2020 - DCECekkyagungNo ratings yet
- A Steganography Intrusion Detection SystemDocument21 pagesA Steganography Intrusion Detection SystemjamessomNo ratings yet