You might also like
- A Working Radiant Free Energy SystemDocument7 pagesA Working Radiant Free Energy Systemmysticdream100% (5)
- Self Running Free Energy Device Muller Motor Generator Romerouk Version1 1Document25 pagesSelf Running Free Energy Device Muller Motor Generator Romerouk Version1 1Hydrostatic0013100% (4)
- New Adjustable Frequency Radiant Charger PDFDocument5 pagesNew Adjustable Frequency Radiant Charger PDFlancerdoom1100% (6)
- The Free Energy TransformerDocument12 pagesThe Free Energy Transformer1234567890sc70% (10)
- Radiant Energy CollectionDocument66 pagesRadiant Energy CollectionKatamba Rogers100% (1)
- Ion-Valve Oscillators and Ion-Valve Converters Technologies (Who's Who in Free Energy)Document74 pagesIon-Valve Oscillators and Ion-Valve Converters Technologies (Who's Who in Free Energy)ernieespells1jtkl56100% (19)
- Free Energy CircuitsDocument16 pagesFree Energy CircuitsMarius StefanNo ratings yet
- William Alek - How To Build Solid-State Electrical Over-Unity DevicesDocument29 pagesWilliam Alek - How To Build Solid-State Electrical Over-Unity Devicesairedale terror100% (8)
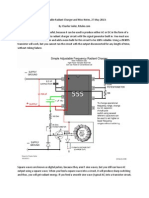
- QEG Tuning & Technical Update - Part 3, and QEG Theory of OperationDocument5 pagesQEG Tuning & Technical Update - Part 3, and QEG Theory of OperationFreeEnergyWorld100% (1)
- Zilano Design Doc A V1Document32 pagesZilano Design Doc A V1Dave Shsh83% (6)
- SR - A Device Replication Installation Tariel KapanadzeDocument7 pagesSR - A Device Replication Installation Tariel KapanadzeSilviu Corcan100% (1)
- Zilano 2Document22 pagesZilano 2blargbl100% (4)
- 2kW Free Energy Device - Don SmithDocument5 pages2kW Free Energy Device - Don SmithJake Mitchell80% (25)
- Free Energy Plans PDFDocument7 pagesFree Energy Plans PDFpic2007100% (2)
- Tesla SwitchDocument47 pagesTesla Switchlittledigger75% (8)
- Kapanadze AllDocument84 pagesKapanadze Allhuku100% (13)
- Kit To Build Fully Functional Bedini Free Energy GeneratorDocument21 pagesKit To Build Fully Functional Bedini Free Energy Generatormartdot73490100% (12)
- Stanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinFrom EverandStanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinNo ratings yet
- Induction Coils - How To Make, Use, And Repair Them: Including Ruhmkorff, Tesla, And Medical Coils, Roentgen, Radiography, Wireless Telegraphy, And Practical Information On Primary And Secodary BatteryFrom EverandInduction Coils - How To Make, Use, And Repair Them: Including Ruhmkorff, Tesla, And Medical Coils, Roentgen, Radiography, Wireless Telegraphy, And Practical Information On Primary And Secodary BatteryRating: 5 out of 5 stars5/5 (2)
- The Magnet Motor: Making Free Energy Yourself Edition 2019From EverandThe Magnet Motor: Making Free Energy Yourself Edition 2019Rating: 4 out of 5 stars4/5 (6)
- Inventions, Researches and Writings of Nikola Tesla: Including Tesla's AutobiographyFrom EverandInventions, Researches and Writings of Nikola Tesla: Including Tesla's AutobiographyNo ratings yet
- Quest For Zero-Point Energy: Engineering Principles for “Free Energyâ€From EverandQuest For Zero-Point Energy: Engineering Principles for “Free Energyâ€Rating: 3 out of 5 stars3/5 (2)
- Alternative Stirling Engines For Free Energy Applications And How To Go About Building Them And Using Them To Generate ElectricityFrom EverandAlternative Stirling Engines For Free Energy Applications And How To Go About Building Them And Using Them To Generate ElectricityRating: 3.5 out of 5 stars3.5/5 (3)
- The Magnet Motor: Making Free Energy Yourself Edition 2019From EverandThe Magnet Motor: Making Free Energy Yourself Edition 2019No ratings yet
- Infinite Energy Technologies: Tesla, Cold Fusion, Antigravity, and the Future of SustainabilityFrom EverandInfinite Energy Technologies: Tesla, Cold Fusion, Antigravity, and the Future of SustainabilityNo ratings yet
- The Free Energy Cover-up: A Hundred Year DeceptionFrom EverandThe Free Energy Cover-up: A Hundred Year DeceptionRating: 5 out of 5 stars5/5 (1)
- The ULTIMATE Tesla Coil Design and Construction GuideFrom EverandThe ULTIMATE Tesla Coil Design and Construction GuideRating: 5 out of 5 stars5/5 (1)
- Tesla's Experiments with Alternating Currents: Including Tesla's AutobiographyFrom EverandTesla's Experiments with Alternating Currents: Including Tesla's AutobiographyNo ratings yet
- Engineering, Science and Antigravity: Challenging the ChallengesFrom EverandEngineering, Science and Antigravity: Challenging the ChallengesRating: 5 out of 5 stars5/5 (4)
- SChapter13 The Adams MotorGeneratorDocument14 pagesSChapter13 The Adams MotorGeneratorpranalar100% (1)
- A Practical Guide To Free EnergyDocument235 pagesA Practical Guide To Free EnergyDorucreatoruNo ratings yet
- What Is A Solar Motor?Document11 pagesWhat Is A Solar Motor?D K SHARMANo ratings yet
- Principles of DC MotorsDocument14 pagesPrinciples of DC MotorsAravind Raj PandianNo ratings yet
- eCARS2x 2018 T1-3 Types Electric Motors-Conferencia4Document4 pageseCARS2x 2018 T1-3 Types Electric Motors-Conferencia4EulerNo ratings yet
- Moving Pulse GeneratorDocument99 pagesMoving Pulse Generatorabc1000100% (1)
- Lab Rep DraftDocument5 pagesLab Rep DraftKent Orriele FadriquelNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Induction, Squirrel Cage Motor - Torque CalculationDocument10 pagesInduction, Squirrel Cage Motor - Torque CalculationAlexandra100% (1)
- EE402 SEM Module 1 PMDC&BLDCDocument41 pagesEE402 SEM Module 1 PMDC&BLDCJohn JNo ratings yet
- Alternator TheoryDocument36 pagesAlternator TheoryCandiano PopescuNo ratings yet
- Stator and rotor of single phase induction motorDocument5 pagesStator and rotor of single phase induction motorjay shahNo ratings yet
- Advantages and Disadvantages of Single Phase MotorsDocument10 pagesAdvantages and Disadvantages of Single Phase Motorsim always awesome100% (1)
- Mca On DC MotorsDocument6 pagesMca On DC MotorsAsaithambi DorairajNo ratings yet
- PMBLDC Motor DriveDocument55 pagesPMBLDC Motor DriveSushant SinghNo ratings yet
- Mini Self-Running GeneratorDocument12 pagesMini Self-Running Generatorgigi_shmen100% (1)
- Lesson 1Document6 pagesLesson 1Justine James NuylesNo ratings yet
- Construction of Electro MagnetsDocument7 pagesConstruction of Electro MagnetsjoetylorNo ratings yet
- R 07 Robots Page7Document4 pagesR 07 Robots Page7straf238No ratings yet
- Simple 48mm Free Energy GeneratorDocument6 pagesSimple 48mm Free Energy GeneratorPopa Gheorghe100% (1)
- Math Coaching1 2ndbooklet (FINAL)Document13 pagesMath Coaching1 2ndbooklet (FINAL)Achilles Aldave100% (5)
- Unit 3 Workbook - AP Phys 1Document27 pagesUnit 3 Workbook - AP Phys 1Swiss PabloNo ratings yet
- Full-Scale Measurements For Wind-Induced Convective Heat Transfer From A Roof-Mounted Flat Plate Solar CollectorDocument9 pagesFull-Scale Measurements For Wind-Induced Convective Heat Transfer From A Roof-Mounted Flat Plate Solar CollectorSam HippeNo ratings yet
- FY BSC Aeronautics (Avo)Document25 pagesFY BSC Aeronautics (Avo)Pritam BombleNo ratings yet
- Physics-1-Module-5-Laboratory Activity No. 5Document3 pagesPhysics-1-Module-5-Laboratory Activity No. 5Vince GarciaNo ratings yet
- Activity Guide & Answer Sheet Activity 6-Uniform Circular MotionDocument5 pagesActivity Guide & Answer Sheet Activity 6-Uniform Circular MotionRonel AlbanNo ratings yet
- Chapter 38 - Photons and Matter WavesDocument12 pagesChapter 38 - Photons and Matter WavesVV Cephei100% (1)
- Gate 1994 PDFDocument16 pagesGate 1994 PDFVammsy Manikanta SaiNo ratings yet
- #محاضره الاولى ميكانيكا موائعDocument29 pages#محاضره الاولى ميكانيكا موائعChoukoura AldfeerNo ratings yet
- 4.1. Magnetic Analysis of A Solenoid Actuator: 4.1.1. Problem SpecificationDocument9 pages4.1. Magnetic Analysis of A Solenoid Actuator: 4.1.1. Problem SpecificationRickson Viahul Rayan CNo ratings yet
- A Two-Stage Stirling CryocoolerDocument7 pagesA Two-Stage Stirling CryocoolerrkoGearNo ratings yet
- Zephyr 20S 62-60519-01 PDFDocument42 pagesZephyr 20S 62-60519-01 PDFAnonymous K53TYtF0% (1)
- SGA-4586Z - SirenzaMicrodevices Markcode 45ZDocument4 pagesSGA-4586Z - SirenzaMicrodevices Markcode 45ZCharlesNo ratings yet
- Electrodynamic Withstand and Effects of Short-Circuit CurrentsDocument6 pagesElectrodynamic Withstand and Effects of Short-Circuit CurrentsTriều Nguyễn NgọcNo ratings yet
- All Elect Panel Moc Dated 15-03-20Document17 pagesAll Elect Panel Moc Dated 15-03-20nadeem UddinNo ratings yet
- Lecture 10Document42 pagesLecture 10Hanan SajidNo ratings yet
- Kinematics of a Particle in a Straight LineDocument55 pagesKinematics of a Particle in a Straight LineisamalhassanNo ratings yet
- AC Electronic Voltmeter CircuitsDocument13 pagesAC Electronic Voltmeter CircuitsTajammul HussainNo ratings yet
- CBSE Grade 12 Physics Project 2015: Refractive Indices of Some Common LiquidsDocument24 pagesCBSE Grade 12 Physics Project 2015: Refractive Indices of Some Common LiquidsSyed Husam100% (1)
- m1 Dynamics FmaDocument7 pagesm1 Dynamics FmadrkhansacademyNo ratings yet
- Comparison GG Am Fuses EnuDocument2 pagesComparison GG Am Fuses EnuNaveed RabbaniNo ratings yet
- Exp#1 Diode Characteristics V2Document12 pagesExp#1 Diode Characteristics V2Shehda ZahdaNo ratings yet
- Design and Simulation of Free Energy Permanent Magnet MotorDocument10 pagesDesign and Simulation of Free Energy Permanent Magnet MotorCristian IonescuNo ratings yet
- Measuring Earth Resistivity Using Wenner MethodDocument3 pagesMeasuring Earth Resistivity Using Wenner MethodErsi AgoNo ratings yet
- RetTelmat pievreaHutumreidofitIny ocofmInincgomAiinrg AirDocument1 pageRetTelmat pievreaHutumreidofitIny ocofmInincgomAiinrg AirCristian MoratayaNo ratings yet
- Kinetics of a Particle: Forces and AccelerationsDocument63 pagesKinetics of a Particle: Forces and AccelerationsGIAN EMMANUELLE SANCHEZNo ratings yet
- AM-6216-P01AB - Operating and Installation DataDocument3 pagesAM-6216-P01AB - Operating and Installation DataEngineering ServiceNo ratings yet
- Experiment Report 1 - Group 2 - Chemistry 40Document12 pagesExperiment Report 1 - Group 2 - Chemistry 40Daniella ChandraNo ratings yet
- HA Specification - Medium & Low Voltage EquipmentDocument46 pagesHA Specification - Medium & Low Voltage Equipmentlisa1913No ratings yet
- Electrical Engineering SlidesDocument12 pagesElectrical Engineering SlidessbatatiNo ratings yet