You might also like
- Assembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageFrom EverandAssembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageRating: 5 out of 5 stars5/5 (1)
- Solutions: CS152 Computer Architecture and EngineeringDocument17 pagesSolutions: CS152 Computer Architecture and EngineeringBabasrinivas GuduruNo ratings yet
- Quiz 9Document10 pagesQuiz 9Babette Frey100% (1)
- RISC V Intro For HackathonDocument40 pagesRISC V Intro For HackathonPavan DhakeNo ratings yet
- Difference Between AVR, ARM, 8051 and PIC MicrocontrollersDocument9 pagesDifference Between AVR, ARM, 8051 and PIC MicrocontrollersAhmad fauzi ihsanNo ratings yet
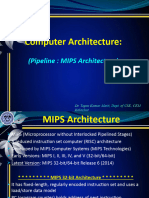
- CA Slides#4 Pipeline MIPS ArchDocument9 pagesCA Slides#4 Pipeline MIPS Archabhijitmandal27068No ratings yet
- CPE 221 Final Exam Solution Fall 2018Document6 pagesCPE 221 Final Exam Solution Fall 2018Kyra LathonNo ratings yet
- PI WI 14 CSE30 Lecture 8 PostDocument49 pagesPI WI 14 CSE30 Lecture 8 PostPrasad DaitNo ratings yet
- Code OptiDocument26 pagesCode Optipad pestNo ratings yet
- Lecture 7: ARM Arithmetic and Bitwise InstructionsDocument34 pagesLecture 7: ARM Arithmetic and Bitwise InstructionsfmsarwarNo ratings yet
- The University of Alabama in Huntsville: r2 r1 Not r1, r2Document5 pagesThe University of Alabama in Huntsville: r2 r1 Not r1, r2Kyra LathonNo ratings yet
- MemoryDocument43 pagesMemoryuma_saiNo ratings yet
- Quiz 1Document12 pagesQuiz 1RexChandu100% (1)
- CS401 ProbvDocument11 pagesCS401 Probvaamir shahzad khanNo ratings yet
- CMPE 470 MIPS TUTORIAL - FALL 2011Document4 pagesCMPE 470 MIPS TUTORIAL - FALL 2011newreillyoNo ratings yet
- Code GenerationDocument43 pagesCode GenerationRosesweetNo ratings yet
- Tutorial QuestionxDocument11 pagesTutorial QuestionxkingraajaNo ratings yet
- Memory Hierarchy AssignmentDocument8 pagesMemory Hierarchy AssignmentAnkit KumarNo ratings yet
- AT - Better C Code For ARM DevicesDocument30 pagesAT - Better C Code For ARM DevicesjvgediyaNo ratings yet
- CSE 30321 - Lecture 02-03 - in Class Example Handout: Discussion - Overview of Stored ProgramsDocument8 pagesCSE 30321 - Lecture 02-03 - in Class Example Handout: Discussion - Overview of Stored ProgramsSandipChowdhuryNo ratings yet
- Code Generation Techniques and IssuesDocument37 pagesCode Generation Techniques and IssuessnameNo ratings yet
- MPS Midterm SolutionDocument4 pagesMPS Midterm SolutionMuhammad AbubakarNo ratings yet
- CSEN701 PA2 Solution 27172 29689Document4 pagesCSEN701 PA2 Solution 27172 29689Sreeraj Pisharody100% (1)
- 03 Assembly Language ProgrammingDocument33 pages03 Assembly Language ProgrammingManoj VelumaniNo ratings yet
- C_LOW_LEVELDocument53 pagesC_LOW_LEVELphanduy1310No ratings yet
- Why Assembly Language?Document74 pagesWhy Assembly Language?ShivamNo ratings yet
- MIPS Assembly TutorialDocument31 pagesMIPS Assembly TutorialEdward WangNo ratings yet
- Running C programs bare metal on ARM using the GNU toolchainDocument118 pagesRunning C programs bare metal on ARM using the GNU toolchainNhân Nhậu NhẹtNo ratings yet
- 19s Cpe221 Final SolutionDocument7 pages19s Cpe221 Final SolutionKyra LathonNo ratings yet
- MIPS Instruction Formats Logical Ops ConditionsDocument27 pagesMIPS Instruction Formats Logical Ops ConditionsXrsamixNo ratings yet
- Week 04Document68 pagesWeek 04aroosa naheedNo ratings yet
- Quiz For Chapter 2 With SolutionsDocument7 pagesQuiz For Chapter 2 With Solutionsnvdangdt1k52bk03100% (1)
- Lecture 2: MIPS Instruction SetDocument24 pagesLecture 2: MIPS Instruction Settratgiakiet2008No ratings yet
- PPC Assembly IntroDocument36 pagesPPC Assembly IntroMohammad Gulam AhamadNo ratings yet
- Week 2Document70 pagesWeek 2abbazh rakhondeNo ratings yet
- Lecture 03Document30 pagesLecture 03hamza abbasNo ratings yet
- S2 23 ES ZG512 Lab Session 02Document22 pagesS2 23 ES ZG512 Lab Session 02rediffoooNo ratings yet
- 1HDocument8 pages1HSandipChowdhuryNo ratings yet
- UE719_Tutorials_ARMDocument6 pagesUE719_Tutorials_ARManyela aquino velasquezNo ratings yet
- Fundamentals of Computer Architecture - Jan 2003 (PAST PAPER)Document3 pagesFundamentals of Computer Architecture - Jan 2003 (PAST PAPER)BIG MNo ratings yet
- Simple Conditions and BranchesDocument4 pagesSimple Conditions and BranchesNapsterNo ratings yet
- MIPS Intro / Decisions: CS270 Unit 3 Max Luttrell, Spring 2017Document47 pagesMIPS Intro / Decisions: CS270 Unit 3 Max Luttrell, Spring 2017kNo ratings yet
- GE42 DSP C6000 SW Pipeline 23Document74 pagesGE42 DSP C6000 SW Pipeline 23jihane elmoujiNo ratings yet
- Ece4750 T01 Proc Concepts ProblemsDocument10 pagesEce4750 T01 Proc Concepts Problemssolf jacobNo ratings yet
- Instructions: Language of The MachineDocument47 pagesInstructions: Language of The MachineVishal MittalNo ratings yet
- ARM Processor1Document22 pagesARM Processor1Venkatesan SundaramNo ratings yet
- ECE 341 Final Exam Solution: Problem No. 1 (10 Points)Document9 pagesECE 341 Final Exam Solution: Problem No. 1 (10 Points)bsudheertecNo ratings yet
- Exam2 Fa2014 SolutionDocument14 pagesExam2 Fa2014 Solutionrafeak rafeakNo ratings yet
- Arm Instruction 2 - 001Document26 pagesArm Instruction 2 - 001Ankit SanghviNo ratings yet
- 2 IsaDocument26 pages2 IsaUmair GhaffarNo ratings yet
- CEG 2131 - Fall 2003 - FinalDocument14 pagesCEG 2131 - Fall 2003 - FinalAmin DhouibNo ratings yet
- EEM336 mt1 Example QuestionsDocument17 pagesEEM336 mt1 Example QuestionsMustafa TuraçNo ratings yet
- Introduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornDocument51 pagesIntroduction To Compilers: Jun.-Prof. Dr. Christian Plessl Custom Computing University of PaderbornHariharan ElangandhiNo ratings yet
- Chapter02 Instructions LogicBranchDocument32 pagesChapter02 Instructions LogicBranchAmanda Judy AndradeNo ratings yet
- VLSIDocument48 pagesVLSIMohamed Sedik CHEBOUTNo ratings yet
- Mic CT-2Document11 pagesMic CT-2manaskadganchi2006kNo ratings yet
- 2 Isa cs161f16Document109 pages2 Isa cs161f16Van Thi Muoi Ngoc NgocNo ratings yet
- EEE347 CNG336 Spring2017 Midterm2 - SLNDocument10 pagesEEE347 CNG336 Spring2017 Midterm2 - SLNEmre OnursoyNo ratings yet
- MIPS Registers: Register Assembly Name CommentDocument9 pagesMIPS Registers: Register Assembly Name CommentdoomachaleyNo ratings yet
- 2 Assembly 1Document54 pages2 Assembly 1Eduardo Garcia BreijoNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Why Germans Work Fewer H... Tudy in Culture - KnoteDocument22 pagesWhy Germans Work Fewer H... Tudy in Culture - KnotepradsepNo ratings yet
- MahanadhiDocument8 pagesMahanadhipradsepNo ratings yet
- Bharathi - Kannan Pattu, Kuyil PattuDocument57 pagesBharathi - Kannan Pattu, Kuyil Pattuapi-3801313No ratings yet
- Synchronous Machines Broad ViewDocument49 pagesSynchronous Machines Broad ViewTopper UnderNo ratings yet
- Vehicular Security SystemDocument37 pagesVehicular Security SystemSreeharsha Vardhan AnnuNo ratings yet
- COA Practical FileDocument39 pagesCOA Practical FileDeepak MishraNo ratings yet
- 32-Bit 5-Stage RISC Processor With 2-Bit Dynamic Branch Predictor FunctionalityDocument79 pages32-Bit 5-Stage RISC Processor With 2-Bit Dynamic Branch Predictor FunctionalitysolmaxNo ratings yet
- Co Unit 1 NotesDocument51 pagesCo Unit 1 NotesKishan Bhat K100% (1)
- Arm FinalDocument108 pagesArm Final1BO20EC026 TOLSTOY DAYCODS ANo ratings yet
- Embedded Systems Interview Questions - Embedded Systems FAQ PDFDocument5 pagesEmbedded Systems Interview Questions - Embedded Systems FAQ PDFnavinarsNo ratings yet
- Chapter 1 Edit PDFDocument40 pagesChapter 1 Edit PDFDragon.D. ArthurNo ratings yet
- ATM Terminal Security Using Fingerprint Recognition: Vaibhav R. Pandit Kirti A. Joshi Narendra G. Bawane, PH.DDocument5 pagesATM Terminal Security Using Fingerprint Recognition: Vaibhav R. Pandit Kirti A. Joshi Narendra G. Bawane, PH.Dseunnuga93No ratings yet
- MicroprocessorDocument2,540 pagesMicroprocessorManas PandeyNo ratings yet
- 8051 Core Microcontroller & InterfacingDocument45 pages8051 Core Microcontroller & InterfacingsumitramotadeNo ratings yet
- CS501 Final Term Solved Paper Mega File - DWNLD FromDocument219 pagesCS501 Final Term Solved Paper Mega File - DWNLD Fromkhalid BhattiNo ratings yet
- 3rd Sem SyllabusDocument15 pages3rd Sem Syllabustest mailNo ratings yet
- Presentation RISC Vs CISCDocument13 pagesPresentation RISC Vs CISCafaakiNo ratings yet
- System Software Unit 1Document14 pagesSystem Software Unit 1TAJCHISHTINo ratings yet
- Introduction to Embedded Systems: An Overview of Key Concepts and ApplicationsDocument75 pagesIntroduction to Embedded Systems: An Overview of Key Concepts and ApplicationsnNo ratings yet
- P3 - Chapter 4 - Processors And Computer ArchitectureDocument8 pagesP3 - Chapter 4 - Processors And Computer ArchitectureAmul BashyalNo ratings yet
- CDA3101 L01 Introduction MSSDocument20 pagesCDA3101 L01 Introduction MSSRosemond FabienNo ratings yet
- AS400 Server Performance ToolsDocument555 pagesAS400 Server Performance Toolsapi-27605687100% (1)
- Eee Study Material at UTSADocument9 pagesEee Study Material at UTSAShreyas KamathNo ratings yet
- Automatic Bell System for InstitutionsDocument48 pagesAutomatic Bell System for InstitutionsSaurav TiwariNo ratings yet
- Basic Computer Architecture: Ateeq Ur RehmanDocument13 pagesBasic Computer Architecture: Ateeq Ur RehmanranaateeqNo ratings yet
- Computer Maintenance & TroubleshootingDocument108 pagesComputer Maintenance & TroubleshootingAMITKURANJEKAR60% (10)
- M.Tech VLSI SyllabusDocument10 pagesM.Tech VLSI SyllabusAshadur RahamanNo ratings yet
- CL Commands ViiiDocument376 pagesCL Commands Viiiapi-3800226100% (2)
- William Stallings Computer Organization and Architecture 7 Edition Computer Evolution and PerformanceDocument44 pagesWilliam Stallings Computer Organization and Architecture 7 Edition Computer Evolution and Performancekhalil ahmadNo ratings yet
- RHD'L: Instruction-Level Parallel Processing: History, Overview and PerspectiveDocument42 pagesRHD'L: Instruction-Level Parallel Processing: History, Overview and PerspectiveAnilRangaNo ratings yet
- ELECH473 Th03Document65 pagesELECH473 Th03hung kungNo ratings yet
- Implementation of RISC Processor On FPGADocument5 pagesImplementation of RISC Processor On FPGAObaid KhanNo ratings yet