You might also like
- Equipment Rental Agreement TemplateDocument3 pagesEquipment Rental Agreement Templatemohamed hussien100% (1)
- Hire Purchase Agreement 5Document4 pagesHire Purchase Agreement 5Samuel MaduekeNo ratings yet
- Training AgreementDocument2 pagesTraining AgreementHoward UntalanNo ratings yet
- Equipment Rental Agreement - Free Template DownloadDocument5 pagesEquipment Rental Agreement - Free Template DownloadMohit GarrgNo ratings yet
- Software Development AgreementDocument3 pagesSoftware Development AgreementMohamed NakhlawyNo ratings yet
- Service Contract Proposal Template - IT PattanaDocument14 pagesService Contract Proposal Template - IT PattanaDuncan NgachaNo ratings yet
- Service Level AgreementDocument14 pagesService Level AgreementGeraldineNo ratings yet
- LGD JESUS REALTY & DEV’T. CORP. HAULING CONTRACTDocument7 pagesLGD JESUS REALTY & DEV’T. CORP. HAULING CONTRACTGonzales CarlNo ratings yet
- Agreement For The Supply of IT ServicesDocument10 pagesAgreement For The Supply of IT ServicesVíctor Vila GómezNo ratings yet
- Master Service Agreement TemplateDocument9 pagesMaster Service Agreement TemplateMartin MulumbaNo ratings yet
- Contract for Mid-Level Healthcare Provider under UHC ProgrammeDocument9 pagesContract for Mid-Level Healthcare Provider under UHC ProgrammeSudhakshiNo ratings yet
- Contract - IsabelDocument6 pagesContract - IsabelHerbert PalacioNo ratings yet
- Native Versus Web White PaperDocument5 pagesNative Versus Web White Paperrenjithr_20009290No ratings yet
- Rent Agreement: Place Date Owner Name ................................... Address Tenant Name AddressDocument5 pagesRent Agreement: Place Date Owner Name ................................... Address Tenant Name AddressPrivate PlugsNo ratings yet
- Cooperation Agreement RentDocument11 pagesCooperation Agreement RentEIS LatviaNo ratings yet
- Travelholics LTD Terms and ConditionsDocument10 pagesTravelholics LTD Terms and ConditionsTravelholicsLtdNo ratings yet
- Jacquelyne Gorton, MSN, JDDocument18 pagesJacquelyne Gorton, MSN, JDmeltwithsnow163.comNo ratings yet
- Food Court Tenancy Agreement 2018Document5 pagesFood Court Tenancy Agreement 2018Micheal EzieNo ratings yet
- Agreement - Ministry of HealthDocument5 pagesAgreement - Ministry of HealthBecoming life changes videoNo ratings yet
- Staff Augmentation Agreement FormDocument11 pagesStaff Augmentation Agreement FormNijo JosephNo ratings yet
- Developer License Agreement 30mar17 - Final v2Document18 pagesDeveloper License Agreement 30mar17 - Final v2Andy DaviesNo ratings yet
- Agile Software 2Document14 pagesAgile Software 2sidheshr1987100% (1)
- Hyperbeat ContractOfLeaseDocument10 pagesHyperbeat ContractOfLeaseMarven John BusqueNo ratings yet
- Sample Contract For Design Professional Services: 1. PartiesDocument24 pagesSample Contract For Design Professional Services: 1. PartiesmuscdalifeNo ratings yet
- Franchise Agreement SampleDocument18 pagesFranchise Agreement SampleRed GaddiNo ratings yet
- Telecomuting AgreementDocument2 pagesTelecomuting AgreementJPFNo ratings yet
- Draft Offer Letter To Be Given by The Landlord (S) Offering Premises On Lease Offer LetterDocument4 pagesDraft Offer Letter To Be Given by The Landlord (S) Offering Premises On Lease Offer LettersachinNo ratings yet
- Contract Amendment Form: SignaturesDocument1 pageContract Amendment Form: SignaturesWen' George BeyNo ratings yet
- Web Hosting Contract Jan 2015Document8 pagesWeb Hosting Contract Jan 2015Dawaam HackenburgNo ratings yet
- Employment Agreement SummaryDocument3 pagesEmployment Agreement SummaryawenskieNo ratings yet
- Trails & Dust FZCO Motorcycle Rental Agreement Terms and ConditionsDocument5 pagesTrails & Dust FZCO Motorcycle Rental Agreement Terms and ConditionsAnderson kurtNo ratings yet
- Software Development AgreementDocument16 pagesSoftware Development AgreementMichael GaladoNo ratings yet
- Cloud ComputingDocument28 pagesCloud ComputingBijoyan DasNo ratings yet
- Regular Employment ContractDocument4 pagesRegular Employment ContractAllenNo ratings yet
- Flutterwave POS Service AgreementDocument17 pagesFlutterwave POS Service AgreementNafiudeen Olajide olohungbayi100% (2)
- Pepperfry: Merchant Services AgreementDocument16 pagesPepperfry: Merchant Services AgreementKunwar ManojNo ratings yet
- Privacy Policy - 20th Feb 2020Document9 pagesPrivacy Policy - 20th Feb 2020Seb de LemosNo ratings yet
- Software Development Non-Disclosure Agreement: ST NDDocument2 pagesSoftware Development Non-Disclosure Agreement: ST NDAmit ChaudharyNo ratings yet
- FOCO Agreement - DraftDocument12 pagesFOCO Agreement - DraftKawal BaggaNo ratings yet
- Contract of LeaseDocument5 pagesContract of LeaseLaw Office of Atty. Benison M. MahawanNo ratings yet
- Agreement in Terms of Section 37 (2) of The Occupational Health and Safety Act (Act NoDocument4 pagesAgreement in Terms of Section 37 (2) of The Occupational Health and Safety Act (Act NoEmma BritzNo ratings yet
- Request For Quotation 2805Document2 pagesRequest For Quotation 2805Anonymous WXJTn0No ratings yet
- Outsourcing Services Contract - PandadocDocument9 pagesOutsourcing Services Contract - PandadocmehboobghaiNo ratings yet
- HR Management and IT Systems Services AgreementDocument19 pagesHR Management and IT Systems Services Agreementwaqastariq77_7812164No ratings yet
- Contract Lease VehicleDocument3 pagesContract Lease VehicleNetfinity SpringvilleNo ratings yet
- Tenancy ContractDocument4 pagesTenancy ContractBen KenNo ratings yet
- 04 Sample-Billboard-Agreement PDFDocument4 pages04 Sample-Billboard-Agreement PDFAbhishek SinghNo ratings yet
- Charlie Contract TemplateDocument4 pagesCharlie Contract TemplateMETANOIANo ratings yet
- Software AgreementDocument2 pagesSoftware AgreementR.s. WartsNo ratings yet
- Contract of Lease - TemplateDocument8 pagesContract of Lease - TemplatelengjavierNo ratings yet
- Oftware Evelopment Greement: Ompany OmpanyDocument7 pagesOftware Evelopment Greement: Ompany OmpanygabrielaNo ratings yet
- This Agreement Made at Mumbai ThisDocument5 pagesThis Agreement Made at Mumbai ThisRoma DuttaNo ratings yet
- Innovise Saas Agreement - FINALDocument16 pagesInnovise Saas Agreement - FINALRyan Ceazar RomanoNo ratings yet
- Service AgreementDocument6 pagesService AgreementJan IvkovićNo ratings yet
- Lease Contract for Condo UnitDocument2 pagesLease Contract for Condo Unitmichelle escabelNo ratings yet
- Software Development AgreementDocument12 pagesSoftware Development AgreementUday DeshpandeNo ratings yet
- Contract of Lease Condominium UnitDocument5 pagesContract of Lease Condominium UnitSergie FloragueNo ratings yet
- Form 0028 - Sample Form of Parking Lease Agreement Parking Lease AgreementDocument4 pagesForm 0028 - Sample Form of Parking Lease Agreement Parking Lease AgreementNatasha MuradNo ratings yet
- Haptic Technology: A Seminar ReportDocument24 pagesHaptic Technology: A Seminar ReportNeelabh PantNo ratings yet
- Haptic Technology Seminar ReportDocument20 pagesHaptic Technology Seminar Reportmanoj guptaNo ratings yet
- Program in Mathcad to Thin Rectangular PlatesDocument12 pagesProgram in Mathcad to Thin Rectangular PlatesPedro Luis Garcia VillegasNo ratings yet
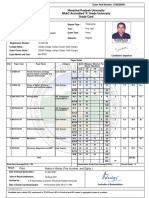
- Serial Number:1920110212668 Exam Roll Number Grade CardDocument2 pagesSerial Number:1920110212668 Exam Roll Number Grade Cardsimran vaidNo ratings yet
- 1.2 Student Workbook ESSDocument7 pages1.2 Student Workbook ESSTanay shahNo ratings yet
- Exp 4 Chem 17 LabDocument7 pagesExp 4 Chem 17 LabGabrielle CatalanNo ratings yet
- PSV Calculations FlareDocument0 pagesPSV Calculations FlareSrinivas BobbyNo ratings yet
- 1 BelzonaDocument41 pages1 BelzonashakeelahmadjsrNo ratings yet
- En010 104 Engineering MechanicsDocument1 pageEn010 104 Engineering MechanicsArun SaiNo ratings yet
- Synthesis and Characterization of Manganese (II), Cobalt (II) and Nickel (II) Complexes of Phenyl Glycine - O-Carboxylic AcidDocument4 pagesSynthesis and Characterization of Manganese (II), Cobalt (II) and Nickel (II) Complexes of Phenyl Glycine - O-Carboxylic AcidJASH MATHEWNo ratings yet
- Jib Cranes 20875644 Colour CatalogueDocument30 pagesJib Cranes 20875644 Colour Cataloguepsingh1996No ratings yet
- Off Grid PV SystemDocument55 pagesOff Grid PV SystemlegasuNo ratings yet
- Powtran PI9000-SDocument105 pagesPowtran PI9000-SOggie Kent Castillo100% (1)
- Orbital Velocity Formula - Solved Example With EquationsDocument5 pagesOrbital Velocity Formula - Solved Example With Equationsmohamad magdyNo ratings yet
- Venn Diagram Generator Academo - Org - Free, Interactive, EducationDocument1 pageVenn Diagram Generator Academo - Org - Free, Interactive, EducationChris DeBruyckereNo ratings yet
- Assignment 4 PDFDocument2 pagesAssignment 4 PDFAhmed Attalla100% (1)
- JC 3000s Clamp-On Ultrasonic FlowmeterDocument4 pagesJC 3000s Clamp-On Ultrasonic FlowmeterXu EmilyNo ratings yet
- Me VR10 PDFDocument153 pagesMe VR10 PDFeng ameer alburihyNo ratings yet
- Chebyshev PolynomialsDocument19 pagesChebyshev PolynomialssofiavictorNo ratings yet
- Turbomachineries School of Mechanical and Industrial Engineering Debre Markos UniversityDocument58 pagesTurbomachineries School of Mechanical and Industrial Engineering Debre Markos UniversitybirlieNo ratings yet
- Science Sample Papers 2Document7 pagesScience Sample Papers 2api-281429068No ratings yet
- Ernest Allen's CVDocument6 pagesErnest Allen's CVernestrallenNo ratings yet
- 2 Stage GearboxDocument47 pages2 Stage GearboxSanad Shajahan0% (1)
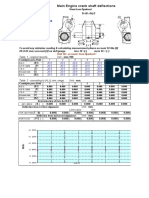
- Crankweb Deflections 9 Cyl ELANDocument2 pagesCrankweb Deflections 9 Cyl ELANСлавик МосинNo ratings yet
- Topic 5 - Criticality of Homogeneous ReactorsDocument53 pagesTopic 5 - Criticality of Homogeneous ReactorsSit LucasNo ratings yet
- Summative Test (Physics)Document3 pagesSummative Test (Physics)Allen Paul GamazonNo ratings yet
- EM I Unit 1Document18 pagesEM I Unit 1Srimathi tjNo ratings yet
- Active Suspension Using SkyhookDocument14 pagesActive Suspension Using SkyhookSandor CleganeNo ratings yet
- Company Profile: BIS CML No.: 7200050893 An Iso 9001:2015 Certified CompanyDocument4 pagesCompany Profile: BIS CML No.: 7200050893 An Iso 9001:2015 Certified CompanyPowerliteNo ratings yet
- Nitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's EncyclopediaDocument49 pagesNitric Acid - Nitrous Acid - Nitrogen Oxides - Ullman's Encyclopediapoly6icsNo ratings yet
- Literature ReviewDocument17 pagesLiterature ReviewSyafiq ShaffiaiNo ratings yet
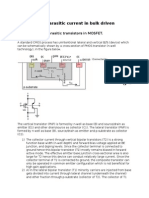
- Bulk Driven MosfetDocument3 pagesBulk Driven MosfetAyandev BarmanNo ratings yet