You might also like
- MATLAB and Octave Functions For Computer Vision and Image ProcessingDocument17 pagesMATLAB and Octave Functions For Computer Vision and Image Processingshivangsharma105629No ratings yet
- TOOLSQA - Free QA Automation Tools Tutorials Part 1Document10 pagesTOOLSQA - Free QA Automation Tools Tutorials Part 1anujNo ratings yet
- Zhenwang YaoDocument1 pageZhenwang YaoAng LiNo ratings yet
- Excel Data Analytics for Engineering ApplicationsDocument1 pageExcel Data Analytics for Engineering ApplicationsK VadlamaniNo ratings yet
- CV - Lecture 5 - Image Extraction MatchingDocument35 pagesCV - Lecture 5 - Image Extraction Matchingabanoubnasser01No ratings yet
- Usman $razaDocument2 pagesUsman $razaahmad imranNo ratings yet
- Java Program To Multiply 2 Matrices - JavatpointDocument6 pagesJava Program To Multiply 2 Matrices - Javatpointhonaday945No ratings yet
- FINALDocument25 pagesFINALnivasiniNo ratings yet
- SIFT Image Matching Algorithm Explained in DepthDocument9 pagesSIFT Image Matching Algorithm Explained in DepthtusarNo ratings yet
- C Emester: B.S .IT: S - VDocument6 pagesC Emester: B.S .IT: S - VS.B ASHIRBADNo ratings yet
- "Smart" Models: Abu and AbuDocument5 pages"Smart" Models: Abu and AbuAbuNo ratings yet
- DownloadDocument4 pagesDownloadFaizan ShaikhNo ratings yet
- The Ultimate JavaScript Cheat SheetDocument26 pagesThe Ultimate JavaScript Cheat Sheetjjp74No ratings yet
- Java Beginner Tutorial - JDBC Tutorial - Tech TutorialsDocument13 pagesJava Beginner Tutorial - JDBC Tutorial - Tech Tutorialstp20165No ratings yet
- Simultaneous Localization and Mapping For Autonomous Robot NavigationDocument5 pagesSimultaneous Localization and Mapping For Autonomous Robot NavigationSheikh SaadNo ratings yet
- 2719 Minify Css LocalhostDocument5 pages2719 Minify Css LocalhostSang NgoNo ratings yet
- Vision PDFDocument242 pagesVision PDFguru87.joshi3473No ratings yet
- Machine Vision Toolbox For MATLAB PDFDocument242 pagesMachine Vision Toolbox For MATLAB PDFAnderson HenriqueNo ratings yet
- Image Convolution ExamplesDocument7 pagesImage Convolution ExamplesTiến Lực NguyễnNo ratings yet
- Image Analysisn and Computer Vision ProjectsDocument12 pagesImage Analysisn and Computer Vision Projectsline follower robotNo ratings yet
- AndroidDocument1 pageAndroidHjishNo ratings yet
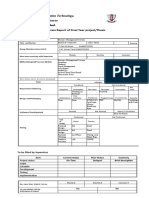
- Mf195 Preliminary ReportDocument4 pagesMf195 Preliminary ReportqwertyNo ratings yet
- Java Magazine 2013 11-12 PDFDocument63 pagesJava Magazine 2013 11-12 PDFPorla RechuchaNo ratings yet
- Learning To Compare Image Patches Via Convolutional Neural NetworksDocument9 pagesLearning To Compare Image Patches Via Convolutional Neural NetworksSiva Jyothi ChandraNo ratings yet
- Utkarsh Dixit DensoDocument1 pageUtkarsh Dixit DensoUtkarsh DixitNo ratings yet
- Autodesk Navisworks Essentials CourseDocument2 pagesAutodesk Navisworks Essentials CourseMy ServoltaNo ratings yet
- Pagespeed WebDocument4 pagesPagespeed WebDipak JaiswalNo ratings yet
- 2719 Minify Css Summary DevDocument4 pages2719 Minify Css Summary DevSang NgoNo ratings yet
- Introduction To Matlab: (Beginners To Advance Level)Document1 pageIntroduction To Matlab: (Beginners To Advance Level)Sunil KumbarNo ratings yet
- BSc IT Notes on Computer Graphics from Annamalai UniversityDocument12 pagesBSc IT Notes on Computer Graphics from Annamalai UniversitygayathriNo ratings yet
- (Solved) HttpServlet Cannot Be Resolved To A TypeDocument7 pages(Solved) HttpServlet Cannot Be Resolved To A TypeRenan GonzalesNo ratings yet
- Comparing ML algorithms: pros, cons, and use casesDocument9 pagesComparing ML algorithms: pros, cons, and use casesXdASDNo ratings yet
- Bit-Plane Slicing - IMAGE PROCESSINGDocument6 pagesBit-Plane Slicing - IMAGE PROCESSINGdexpaulwNo ratings yet
- Regression Testing - Its Features and AdvantagesDocument6 pagesRegression Testing - Its Features and Advantagespramod mgNo ratings yet
- OpenglfinalDocument33 pagesOpenglfinal1229- TCSNo ratings yet
- Abaqus Python Scripting: How Difficult Is It?Document12 pagesAbaqus Python Scripting: How Difficult Is It?Héctor Enrique Jaramillo SuárezNo ratings yet
- Sibnapu: A Methodology For The Understanding of Scatter/Gather I/ODocument6 pagesSibnapu: A Methodology For The Understanding of Scatter/Gather I/OmaxxflyyNo ratings yet
- Hand Gesture RecognitionDocument11 pagesHand Gesture RecognitionKuldeep Singh100% (1)
- Reactivity With SignalsDocument53 pagesReactivity With SignalsViktor BlaskovicsNo ratings yet
- Non Linear Control of Four Wheel Omnidirectional Mobile Robot Modeling Simulation Real Time ImplementationDocument23 pagesNon Linear Control of Four Wheel Omnidirectional Mobile Robot Modeling Simulation Real Time Implementationchahinez abdellaouiNo ratings yet
- Blur and Motion Blur Influence On Face Recognition PerformanceDocument5 pagesBlur and Motion Blur Influence On Face Recognition PerformanceDhanya BNo ratings yet
- Phase-II - PPT - Template-Updated by RizaDocument18 pagesPhase-II - PPT - Template-Updated by RizaRizaur RehamanNo ratings yet
- DesignDocument17 pagesDesignherusyahputraNo ratings yet
- Detect Skin Disease Using Image ProcessingDocument9 pagesDetect Skin Disease Using Image ProcessingSaidhaNo ratings yet
- Forward-Error Correction Considered HarmfulDocument7 pagesForward-Error Correction Considered HarmfulCloakManiaNo ratings yet
- Core Framework Core Framework Core Framework Core FrameworkDocument1 pageCore Framework Core Framework Core Framework Core Frameworkrony199191No ratings yet
- EJB Strategies for PerformanceDocument3 pagesEJB Strategies for PerformanceBharat BansodeNo ratings yet
- STEPS IN THE PROCESS FLOW DIAGRAMDocument15 pagesSTEPS IN THE PROCESS FLOW DIAGRAMJanica Rheanne JapsayNo ratings yet
- Performance: Performance Accessibility Best Practices SEO Progressive Web AppDocument4 pagesPerformance: Performance Accessibility Best Practices SEO Progressive Web AppMatheus Medeiros DiasNo ratings yet
- Ferchau It Skillplan eDocument2 pagesFerchau It Skillplan eSafoNo ratings yet
- Mobile App DevelopmentDocument198 pagesMobile App Developmentnipuni webNo ratings yet
- 9 A Life Cycle of A Thread in JavaDocument7 pages9 A Life Cycle of A Thread in Javahonaday945No ratings yet
- A Free MATLAB Alternative Called OctaveDocument6 pagesA Free MATLAB Alternative Called OctavemivanoNo ratings yet
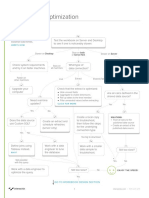
- Tableau Performance Optimization Flow Chart 2020Document3 pagesTableau Performance Optimization Flow Chart 2020Samaksh KumarNo ratings yet
- CV Format by NavneetDocument1 pageCV Format by NavneetNavneetKumarNo ratings yet
- Portfolio: Jaineel Ashok Desai M.S. in Mechanical Engineering, USCDocument32 pagesPortfolio: Jaineel Ashok Desai M.S. in Mechanical Engineering, USCJaineel DesaiNo ratings yet
- Dzone RC RxjsDocument6 pagesDzone RC RxjsPatricio AscencioNo ratings yet
- The Relationship Between Multicast Apps and SemaphoresDocument7 pagesThe Relationship Between Multicast Apps and SemaphoresrafaelcardosoengNo ratings yet
- Machine Learning in Python: Hands on Machine Learning with Python Tools, Concepts and TechniquesFrom EverandMachine Learning in Python: Hands on Machine Learning with Python Tools, Concepts and TechniquesRating: 5 out of 5 stars5/5 (1)
- Machine Learning in Python: Hands on Machine Learning with Python Tools, Concepts and TechniquesFrom EverandMachine Learning in Python: Hands on Machine Learning with Python Tools, Concepts and TechniquesRating: 5 out of 5 stars5/5 (10)
- Print - Swarm Algorithms - Clever Algorithms Nature-Inspired Programming RecipesDocument3 pagesPrint - Swarm Algorithms - Clever Algorithms Nature-Inspired Programming RecipesDevidas JadhavNo ratings yet
- Improved Power-Of-Two Sharpening Filter DesignDocument5 pagesImproved Power-Of-Two Sharpening Filter DesignDevidas JadhavNo ratings yet
- Genetic Algorithms: Potential Tools in Fitting Hearing Aids: Nazanin Nooraei, MS., FAAADocument20 pagesGenetic Algorithms: Potential Tools in Fitting Hearing Aids: Nazanin Nooraei, MS., FAAADevidas JadhavNo ratings yet
- 3G Technology Players and IMT-2000 FrameworkDocument6 pages3G Technology Players and IMT-2000 FrameworkHarish AgrahariNo ratings yet
- 12-Lead EKG Interpretation GuideDocument56 pages12-Lead EKG Interpretation GuideTnem NatNo ratings yet
- ECG InerpretitionDocument12 pagesECG InerpretitionMended_Heart100% (6)
- What Is The WHT Anyway, and Why Are There So Many Ways To Compute It?Document22 pagesWhat Is The WHT Anyway, and Why Are There So Many Ways To Compute It?Sandeep AroraNo ratings yet
- Example of Perspective TransformationDocument2 pagesExample of Perspective TransformationNitin Suyan PanchalNo ratings yet
- Chapter Four 4. TransformationsDocument14 pagesChapter Four 4. TransformationsmazengiyaNo ratings yet
- Homogeneus CoordinatesDocument27 pagesHomogeneus Coordinatesvinay kumarNo ratings yet
- Cim 23.6Document81 pagesCim 23.6RajeshKumarNo ratings yet
- Visvesvaraya Technological University, BelagaviDocument50 pagesVisvesvaraya Technological University, BelagaviDEEPAK S 18MCD1038No ratings yet
- p52 GoldmanDocument35 pagesp52 GoldmanJerónimo CardanoNo ratings yet
- Matrices in Computer Graphics: Nataša LONČARIĆ, Damira KEČEK, Marko KRALJIĆDocument4 pagesMatrices in Computer Graphics: Nataša LONČARIĆ, Damira KEČEK, Marko KRALJIĆSriharshitha DeepalaNo ratings yet
- Peter's Functions For Computer VisionDocument15 pagesPeter's Functions For Computer VisionDevidas JadhavNo ratings yet
- HCTM ExplainedDocument16 pagesHCTM ExplainedKrishna KulkarniNo ratings yet
- Lab Course Kinect Programming For Computer Vision: TransformationsDocument57 pagesLab Course Kinect Programming For Computer Vision: TransformationsAna SousaNo ratings yet
- Assignment - 01 - Computer - Vision - Ipynb - Colaboratory Ana Velez-Boris OspinaDocument17 pagesAssignment - 01 - Computer - Vision - Ipynb - Colaboratory Ana Velez-Boris OspinaAna VelezNo ratings yet
- L4 - II Computer GraphicsDocument21 pagesL4 - II Computer GraphicsروابيNo ratings yet
- CAD Dr.C.K.shene Geometric ConceptsDocument26 pagesCAD Dr.C.K.shene Geometric ConceptsDineshNewalkarNo ratings yet
- Geometry Projective - Tom DavisDocument14 pagesGeometry Projective - Tom Daviscarmo-neto100% (1)
- LectureNotes Ilovepdf Compressed Ilovepdf Compressed PDFDocument237 pagesLectureNotes Ilovepdf Compressed Ilovepdf Compressed PDFAnonymous 9c6pNjdNo ratings yet
- Transformations and Homogeneous Coordinates in Computer GraphicsDocument15 pagesTransformations and Homogeneous Coordinates in Computer GraphicsAndinetAssefaNo ratings yet
- Sweep - Translational and RotationalDocument6 pagesSweep - Translational and RotationalkannanvikneshNo ratings yet
- Microlink Introduction to Coordinate TransformationsDocument14 pagesMicrolink Introduction to Coordinate Transformationsnaod abrehamNo ratings yet
- Chapter 5 Computer GraphicsDocument14 pagesChapter 5 Computer Graphicsibrahin mahamedNo ratings yet
- Introduction To CAD/CAMDocument81 pagesIntroduction To CAD/CAMTafesse100% (6)
- Geometric TransformationsDocument40 pagesGeometric TransformationssfundsNo ratings yet
- Paquete RGL en RDocument81 pagesPaquete RGL en RJose RCNo ratings yet
- DesignDocument8 pagesDesignAmiya Ranjan PaniNo ratings yet
- Homogeneous CoordinatesDocument27 pagesHomogeneous CoordinatesGogyNo ratings yet
- Camera Projection: Reading: T&V Section 2.4Document34 pagesCamera Projection: Reading: T&V Section 2.4Arbit100% (1)
- Geometric Transformations in OpenGLDocument44 pagesGeometric Transformations in OpenGLWinnie TandaNo ratings yet
- Digital Video Spatial TransformationsDocument20 pagesDigital Video Spatial TransformationsebwNo ratings yet
- 2D Transformations in Computer GraphicsDocument32 pages2D Transformations in Computer GraphicsIAGPLSNo ratings yet
- Projective Geometry and TransformationsDocument37 pagesProjective Geometry and TransformationsyaswanthNo ratings yet
- Materi 03. 2D Geometric Transformation: Komputer GrafikDocument33 pagesMateri 03. 2D Geometric Transformation: Komputer GrafikFauzi RahadianNo ratings yet