You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Rendered PageDocument2 pagesRendered Pageرضا حسنNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Assignment 1Document11 pagesAssignment 1رضا حسن0% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- AFISDocument55 pagesAFISرضا حسنNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Tate VitaDocument10 pagesTate Vitaرضا حسنNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Efficient Iris Recognition Method For Human Identification: A. Basit, M. Y. Javed, M. A. AnjumDocument3 pagesEfficient Iris Recognition Method For Human Identification: A. Basit, M. Y. Javed, M. A. Anjumرضا حسنNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Mobile Agent Based Messaging Mechanism For Emergency Medical Data Transmission Cellular NetworksDocument6 pagesMobile Agent Based Messaging Mechanism For Emergency Medical Data Transmission Cellular Networksرضا حسنNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Journal Pre ProofDocument17 pagesJournal Pre ProofMirNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Power System Transients: Parameter Determination: D D R D D D D RDocument1 pagePower System Transients: Parameter Determination: D D R D D D D RIsnam JukicNo ratings yet
- USFS Timber Cruising Handbook PDFDocument268 pagesUSFS Timber Cruising Handbook PDFJeffTaborNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- General Solution For The Dynamic Modeling of Parallel RobotsDocument8 pagesGeneral Solution For The Dynamic Modeling of Parallel RobotsHuynh TLoiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Motion 1 TheoryDocument13 pagesMotion 1 TheoryAyaan KachwalaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Properties of Uniform Circular MotionDocument16 pagesProperties of Uniform Circular MotionAndresEstebanSilvaSanchezNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Madilyn Kendall - Orchard Hideout PortfolioDocument7 pagesMadilyn Kendall - Orchard Hideout Portfolioapi-491224892No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Hindi Basic-1 PDFDocument66 pagesHindi Basic-1 PDFSujeet kashyapNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Rapid Learning in Robotics PDFDocument169 pagesRapid Learning in Robotics PDFDeondre PonybiyNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Magic Numbers Sofia Gubaidulina PDFDocument9 pagesMagic Numbers Sofia Gubaidulina PDFMA LobatoNo ratings yet
- Procceding USN ADRI 2020 - FarmanDocument9 pagesProcceding USN ADRI 2020 - Farmanbolo deweNo ratings yet
- Find PDFDocument1 pageFind PDFanand chowdaryNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Freeway Weaving Segments: US HCM 2010 - Chapter 12Document38 pagesFreeway Weaving Segments: US HCM 2010 - Chapter 12Febriasty TanjungNo ratings yet
- MTH 210A Assignment 6Document2 pagesMTH 210A Assignment 6Rohit SharmaNo ratings yet
- MathsStandard SQPDocument5 pagesMathsStandard SQPmehulbokade27No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Programs On Loops: A-35 Python AssingmentDocument12 pagesPrograms On Loops: A-35 Python AssingmentA- 08 KaushikiNo ratings yet
- Planning Plant ProductionDocument10 pagesPlanning Plant ProductionjokoNo ratings yet
- State Estimation Using Kalman FilterDocument32 pagesState Estimation Using Kalman FilterViraj ChaudharyNo ratings yet
- Algebra and Trigonometry 10th Edition Sullivan Test Bank Full Chapter PDFDocument68 pagesAlgebra and Trigonometry 10th Edition Sullivan Test Bank Full Chapter PDFmatthewjordankwnajrxems100% (14)
- Inverse Functions Code PuzzleDocument3 pagesInverse Functions Code PuzzleDarrenPurtillWrightNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Introduction To Algorithms Greedy: CSE 680 Prof. Roger CrawfisDocument69 pagesIntroduction To Algorithms Greedy: CSE 680 Prof. Roger CrawfisSohaibNo ratings yet
- Chapter 1: Introduction: 1.1 Practical Column Base Details in Steel StructuresDocument135 pagesChapter 1: Introduction: 1.1 Practical Column Base Details in Steel Structuressom_bs79100% (1)
- Contoh Text BiographyDocument2 pagesContoh Text BiographySendi Aditya SabrinaNo ratings yet
- HS20Document8 pagesHS20kumarg_19No ratings yet
- Chi Square DistributionsDocument3 pagesChi Square DistributionsLetsogile BaloiNo ratings yet
- Vertical Line TestDocument3 pagesVertical Line TestAngel Silva VicenteNo ratings yet
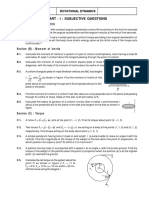
- CPP1 RotationaldynamicsDocument14 pagesCPP1 RotationaldynamicsBNo ratings yet
- Multi Step Questions - PowerPointDocument9 pagesMulti Step Questions - PowerPointbrhNo ratings yet
- DLL Math 10 Q2 D4Document8 pagesDLL Math 10 Q2 D4Carmina DuldulaoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)