You might also like
- Confidential Manual for Rainbow 150 Welder RepairDocument54 pagesConfidential Manual for Rainbow 150 Welder RepairJaroslaw Brzozowski100% (2)
- Introduction To Electrical EngineeringDocument895 pagesIntroduction To Electrical EngineeringSer 345No ratings yet
- John Deere Diesel GensetDocument2 pagesJohn Deere Diesel Gensetnanocycle0% (1)
- ESR Tester 096kDocument41 pagesESR Tester 096kFabrício AngieneNo ratings yet
- A Safe Method For Spot Welding v1.11 5 12Document11 pagesA Safe Method For Spot Welding v1.11 5 12Petar Ivan100% (1)
- Basics of Electrical Engineering - A Text Book For First Year B Tech Students of Engineering (All Specializations)Document11 pagesBasics of Electrical Engineering - A Text Book For First Year B Tech Students of Engineering (All Specializations)dennyNo ratings yet
- Learn to Design a High-Frequency Power Transformer Using Forward TopologyDocument3 pagesLearn to Design a High-Frequency Power Transformer Using Forward TopologyNiranjan kumarNo ratings yet
- Solar Battery Charger CircuitDocument4 pagesSolar Battery Charger Circuittim schroderNo ratings yet
- Infineon ControllerDocument134 pagesInfineon ControllerJesus gomez corvalanNo ratings yet
- An32f PDFDocument12 pagesAn32f PDFPaulo MonteiroNo ratings yet
- Semiconductor Device and Physics ApplicationDocument336 pagesSemiconductor Device and Physics ApplicationNguyenPhucTruong100% (1)
- Schematic Diagram OverviewDocument12 pagesSchematic Diagram Overviewalfredo_izquierdo_12No ratings yet
- Distribution and Substation: TransformersDocument72 pagesDistribution and Substation: Transformersheatra2222No ratings yet
- Design and Implementation of A Solar Charge Controller With Variable OutputDocument12 pagesDesign and Implementation of A Solar Charge Controller With Variable OutputManish kumar100% (1)
- Integrated CircuitsDocument108 pagesIntegrated CircuitsECEHOD SECNo ratings yet
- 5635.under The Hood of Flyback SMPS DesignsDocument41 pages5635.under The Hood of Flyback SMPS DesignsAntochi CiprianNo ratings yet
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- DC-DC Part 6 DoubleDocument18 pagesDC-DC Part 6 DoubleDefne AktemizNo ratings yet
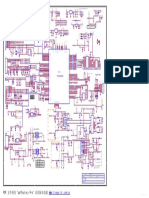
- Pdf 文件使用 "Pdffactory Pro" 试用版本创建 Ÿÿ: Tsumv26KuDocument1 pagePdf 文件使用 "Pdffactory Pro" 试用版本创建 Ÿÿ: Tsumv26KuVladimir SazanovecNo ratings yet
- Electronics 11 PDFDocument342 pagesElectronics 11 PDFKawsar Mobin100% (1)
- SEMIKRON Application Manual Power SemiconductorsDocument466 pagesSEMIKRON Application Manual Power SemiconductorsthietdaucongNo ratings yet
- Switching Power Supply CalculationsDocument4 pagesSwitching Power Supply CalculationsEdilson TavaresNo ratings yet
- AC Circuit Fundamentals: Electricity and New EnergyDocument48 pagesAC Circuit Fundamentals: Electricity and New Energyraihan.kuet.bmeNo ratings yet
- Power Electronics Forward ConverterDocument53 pagesPower Electronics Forward ConverterAbderrahmane WardiNo ratings yet
- Resistive Circuits: Chapter 3 in Dorf and SvobodaDocument47 pagesResistive Circuits: Chapter 3 in Dorf and Svobodaananzo3biNo ratings yet
- DC Power Electronics: Electricity and New EnergyDocument39 pagesDC Power Electronics: Electricity and New EnergyMuhammad SalmanNo ratings yet
- Transistor CircuitsDocument9 pagesTransistor CircuitsYogesh YadavNo ratings yet
- Chapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Document119 pagesChapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Minh Hai RungNo ratings yet
- 6655 Lab Manual 2Document162 pages6655 Lab Manual 2Brett Hendricks100% (1)
- PSIM User ManualDocument259 pagesPSIM User ManualCourtney JenningsNo ratings yet
- 01 - 10 - 2013 - 15 - 26 - 40MV Current Transformers PDFDocument38 pages01 - 10 - 2013 - 15 - 26 - 40MV Current Transformers PDFMihai BancuNo ratings yet
- Electrical Networks and RESONANCE SQA.Document124 pagesElectrical Networks and RESONANCE SQA.Ibrahim KhleifatNo ratings yet
- Phase Control Using SCR SDocument8 pagesPhase Control Using SCR StekellamerZ aka tekellamerNo ratings yet
- Schneider EasyPact EXE - DATASHEETDocument76 pagesSchneider EasyPact EXE - DATASHEETTayhelliton CezarNo ratings yet
- 0-50V 3A Variable Power SupplyDocument17 pages0-50V 3A Variable Power SupplyferdinandNo ratings yet
- Switch Mode Power Supply Topologies Compared - Wurth Electronics MidcomDocument4 pagesSwitch Mode Power Supply Topologies Compared - Wurth Electronics Midcommayank shuklaNo ratings yet
- Power Electronics Devices LectureDocument78 pagesPower Electronics Devices LectureM Waqar ZahidNo ratings yet
- Iec62271-111 (Ed1 0) en PDFDocument8 pagesIec62271-111 (Ed1 0) en PDFAle0% (1)
- Power Electronics: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument13 pagesPower Electronics: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- Flyback Transformer: Speaker: WE Technical ACADEMY Ing. Andrea de GruttolaDocument56 pagesFlyback Transformer: Speaker: WE Technical ACADEMY Ing. Andrea de Gruttolahenryma100% (2)
- AQ3485Y ManualDocument15 pagesAQ3485Y ManualVu SonNo ratings yet
- Philips 40pfl3505df7 Chassis Pl10 5Document87 pagesPhilips 40pfl3505df7 Chassis Pl10 5latino52No ratings yet
- Manual Axpert KING PYLONDocument59 pagesManual Axpert KING PYLONEllis BergmanNo ratings yet
- A High Performance Reference BGR Circuit With Improved Input Offset Voltage of Op-AmpDocument7 pagesA High Performance Reference BGR Circuit With Improved Input Offset Voltage of Op-AmpPriyanka SirohiNo ratings yet
- Sanyo DCG-105 Sistema Audio CD-MP3 Manual SimpleDocument11 pagesSanyo DCG-105 Sistema Audio CD-MP3 Manual Simplecharly36No ratings yet
- 14mt2ad2da V2.0.0Document1 page14mt2ad2da V2.0.0Bryan Felton100% (1)
- LCR MeasurementsDocument16 pagesLCR Measurementsdhoo_babyNo ratings yet
- Daewood Hc6120uDocument40 pagesDaewood Hc6120uAna Six100% (1)
- Precision Curvature-Compensated CMOS Bandgap ReferenceDocument10 pagesPrecision Curvature-Compensated CMOS Bandgap ReferenceAnonymous TPVfFif6TONo ratings yet
- FETs vs. BJTs: Key DifferencesDocument102 pagesFETs vs. BJTs: Key DifferencesanjanaNo ratings yet
- Electrical Machine 3Document4 pagesElectrical Machine 3AbhishekNo ratings yet
- Chap4-Buck Boost and FlybackDocument29 pagesChap4-Buck Boost and FlybackArchit BaglaNo ratings yet
- An Overview of Switched-Mode Power Supplies: Integrated CircuitsDocument6 pagesAn Overview of Switched-Mode Power Supplies: Integrated CircuitsJohn Wanyoike MakauNo ratings yet
- Manual SMC Dialog Plus Controller. Allen BradleyDocument189 pagesManual SMC Dialog Plus Controller. Allen BradleygreenlinexNo ratings yet
- Lecture Notes For Analog ElectronicsDocument54 pagesLecture Notes For Analog Electronicsmom028No ratings yet
- Pipe Descaler DIY Project Provides Low-Cost AlternativeDocument1 pagePipe Descaler DIY Project Provides Low-Cost AlternativeOvidiu FratuNo ratings yet
- Designing Your Emi FilterDocument8 pagesDesigning Your Emi FilterVictor Pastor RebolloNo ratings yet
- Articol - Dewan - Rectifier Filter Design PDFDocument7 pagesArticol - Dewan - Rectifier Filter Design PDFCovaci BogdanNo ratings yet
- Aiwa TV C2121 PDFDocument43 pagesAiwa TV C2121 PDFAsallimitNo ratings yet
- HCNR200 Application NoteDocument10 pagesHCNR200 Application NoteLogan JohnsonNo ratings yet
- Advanced Courses in Power ElectronicDocument147 pagesAdvanced Courses in Power ElectronicCHOUDERNo ratings yet
- Lab Activity No. 5 - Frequency Modulation GenerationDocument9 pagesLab Activity No. 5 - Frequency Modulation GenerationDavy JonesNo ratings yet
- LTC 4060Document20 pagesLTC 4060Sherif EltoukhiNo ratings yet
- Voltage Dividers and Current DividersDocument24 pagesVoltage Dividers and Current DividersRon RexNo ratings yet
- Regulation - 2010: K.S.Rangasamy College of Technology, Tiruchengode - 637 215Document3 pagesRegulation - 2010: K.S.Rangasamy College of Technology, Tiruchengode - 637 215Latta SakthyyNo ratings yet
- Group 15 Fuel Warmer System Specs and OperationDocument1 pageGroup 15 Fuel Warmer System Specs and OperationDavidNo ratings yet
- Ka 3511Document28 pagesKa 3511analias100% (1)
- ADM2 Fault Codes Diagnosis, Version 203: DTC Description Remedial ActionDocument5 pagesADM2 Fault Codes Diagnosis, Version 203: DTC Description Remedial ActionJulioRamirezNo ratings yet
- Planing PM Centrale GPEG 2021Document4 pagesPlaning PM Centrale GPEG 2021Salim82 LKNo ratings yet
- PGX2 IngDocument5 pagesPGX2 IngpiabNo ratings yet
- Philips Fwc220Document28 pagesPhilips Fwc220Ionel RusNo ratings yet
- Electrical Quantities (Multiple Choice) QPDocument25 pagesElectrical Quantities (Multiple Choice) QPRenjith Raveendran PillaiNo ratings yet
- Manual CMP45Document10 pagesManual CMP45Mickael SoaresNo ratings yet
- Analog I/o ModuleDocument20 pagesAnalog I/o Modulecamus1125No ratings yet
- Polycab Cables Pricelist (New)Document8 pagesPolycab Cables Pricelist (New)P.p. Arul IlancheeranNo ratings yet
- Piyali MoulickDocument2 pagesPiyali MoulickparthaNo ratings yet
- lg55ld520 SM PDFDocument71 pageslg55ld520 SM PDFDan Prewitt100% (1)
- JBL Manual - Northridge E150PDocument8 pagesJBL Manual - Northridge E150PionelflorinelNo ratings yet
- Hybrid Power SystemsDocument29 pagesHybrid Power SystemsR. Mega Mahmudia100% (1)
- KOOV Educator Kit SONYDocument8 pagesKOOV Educator Kit SONYAlfonso CalderonNo ratings yet
- Sai Vidya Institute of Technology: QuestionsDocument7 pagesSai Vidya Institute of Technology: QuestionsSuprithaNo ratings yet
- High Speed Can Bus Transceiver: DescriptionDocument9 pagesHigh Speed Can Bus Transceiver: Descriptionsweety987No ratings yet
- Bandwidth Enhancement of Microstrip Patch Antenna For 5.8 GHZ by Optimized Feed OffsetDocument4 pagesBandwidth Enhancement of Microstrip Patch Antenna For 5.8 GHZ by Optimized Feed OffsetbhawnaNo ratings yet
- Fronius Storage SolutionDocument4 pagesFronius Storage SolutionMihai RaduNo ratings yet
- Evaluation of Power Density For Three Phase Double-Sided Axial Flux Slotted PM GeneratorDocument10 pagesEvaluation of Power Density For Three Phase Double-Sided Axial Flux Slotted PM GeneratorBilly BryanNo ratings yet