You might also like
- Mozaicos FotograficosDocument14 pagesMozaicos FotograficosJesusRamosCardozo0% (1)
- Imforme de Planeamiento de VueloDocument25 pagesImforme de Planeamiento de VueloMonteza Villanueva ArnoldNo ratings yet
- Tabla Del Coeficiente Del Cultivo KCDocument5 pagesTabla Del Coeficiente Del Cultivo KCManuelA.Garcia0% (1)
- EIA en proyectos sanitariosDocument112 pagesEIA en proyectos sanitariosAlex AlanezNo ratings yet
- Fundamentos de La Restitución FotogrametricaDocument16 pagesFundamentos de La Restitución FotogrametricaLuis Angel Vega PantaNo ratings yet
- Manual de Obras I PDFDocument108 pagesManual de Obras I PDFAlex AlanezNo ratings yet
- Ander Egg Metodos y Tecnicas de Investigacion SocialDocument23 pagesAnder Egg Metodos y Tecnicas de Investigacion Sociallaiky100% (1)
- Orientación Interna o InteriorDocument16 pagesOrientación Interna o InteriorFaustho Arce Gomez100% (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenFrom EverandEjercicios de Integrales de Línea, Superficie y VolumenRating: 4 out of 5 stars4/5 (2)
- MetodosLevantamientoCatastralFotogrametriaDocument58 pagesMetodosLevantamientoCatastralFotogrametriaChristopherBaltazar83% (6)
- Diseño y Construcción de Un BALL and BEAMDocument5 pagesDiseño y Construcción de Un BALL and BEAMdaednicaNo ratings yet
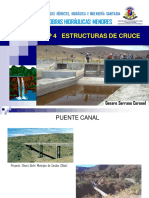
- Presentacion Desarenador AliviaderoDocument26 pagesPresentacion Desarenador AliviaderoAlex AlanezNo ratings yet
- Fundamentos de La Restitución FotogrametricaDocument6 pagesFundamentos de La Restitución FotogrametricaCarlos Oliver Echalar OlmosNo ratings yet
- 1 Restitucion Analogica y SemianaliticaDocument44 pages1 Restitucion Analogica y SemianaliticaInnsats Es Suksess100% (1)
- 1 Restitucion Analogica y SemianaliticaDocument46 pages1 Restitucion Analogica y SemianaliticaguillermoNo ratings yet
- Sem8 VisionDocument4 pagesSem8 VisionNaye FuentesNo ratings yet
- RESTIDocument40 pagesRESTIAbad QuispeNo ratings yet
- Orientación InteriorDocument17 pagesOrientación InteriorAlexia Dagnino0% (1)
- Clasificación de Instrumentos de RestituciónDocument8 pagesClasificación de Instrumentos de RestituciónAlexis CabreraNo ratings yet
- Correcciones GeometricasDocument19 pagesCorrecciones Geometricasshine_rose29No ratings yet
- Algoritmo de MapeoDocument22 pagesAlgoritmo de MapeoCRISTIAN FLOREZ TRASLAVINANo ratings yet
- Plan vuelo fotogrametría 40Document12 pagesPlan vuelo fotogrametría 40The GzuXNo ratings yet
- Restitución aerofotogramétrica para estudios de carreterasDocument7 pagesRestitución aerofotogramétrica para estudios de carreterasMilloCuestaNo ratings yet
- Restitución FotogramétricoDocument25 pagesRestitución FotogramétricoOlivares VelasquezNo ratings yet
- Control de Posición y Seguimiento de CaminosDocument7 pagesControl de Posición y Seguimiento de CaminosRonil TrujilloNo ratings yet
- Fundamentos FotogramétricosDocument8 pagesFundamentos FotogramétricosNATALIA ANDREA BEDOYA HERRERANo ratings yet
- Restitucion 2-2020Document14 pagesRestitucion 2-2020Edwin LujanoNo ratings yet
- Orientación InternaDocument14 pagesOrientación InternaJuan Luis MorrisonNo ratings yet
- Corrección Geométrica PDFDocument67 pagesCorrección Geométrica PDFDavid Enríquez CubillasNo ratings yet
- Ortofotogrametria Digital KindleDocument16 pagesOrtofotogrametria Digital KindleLimber LozaNo ratings yet
- FOTOGRAMETRÍADocument29 pagesFOTOGRAMETRÍARottman Montaño DelgadoNo ratings yet
- TEMA 10 OrtofotogrametriaDocument29 pagesTEMA 10 OrtofotogrametriappantorrillaNo ratings yet
- Restitución AerofotogramétricaDocument6 pagesRestitución AerofotogramétricaShane AulestiaNo ratings yet
- NTP 339.088 AguaDocument8 pagesNTP 339.088 AguaPEPELUCHO2000No ratings yet
- Fotogrametria DigitalDocument43 pagesFotogrametria DigitalCRISTIAN DAVID NI�O GONZALEZNo ratings yet
- FOTOGRAMETRÍADocument10 pagesFOTOGRAMETRÍASantiago Villota MesiasNo ratings yet
- Trabajo Topografia 20 Henry BriceñoDocument8 pagesTrabajo Topografia 20 Henry Briceñohabp61No ratings yet
- PROCESO FOTOGRAMÉTRICO DIGITAL - DocxaaDocument13 pagesPROCESO FOTOGRAMÉTRICO DIGITAL - DocxaagrangerpdNo ratings yet
- Restitucion AerofotogrametricaDocument7 pagesRestitucion AerofotogrametricaNatalie PageNo ratings yet
- Bloque FotogramétricoDocument6 pagesBloque FotogramétricoCristian TacuriNo ratings yet
- Características de Las Cámaras AereasDocument5 pagesCaracterísticas de Las Cámaras AereasManuel PeñalozaNo ratings yet
- Fotogrametría y percepción remota: nociones generalesDocument11 pagesFotogrametría y percepción remota: nociones generalesJ. Ronald Acebo MollinedoNo ratings yet
- Planificacion de Un Proyecto FotogrametricoDocument23 pagesPlanificacion de Un Proyecto FotogrametricoLuis González CastroNo ratings yet
- Robotica Control de TrayectoriasDocument18 pagesRobotica Control de TrayectoriasOSCAR RICARDO MENDEZ SOTONo ratings yet
- Pendulo InvertidoDocument12 pagesPendulo InvertidoJazahel EspinosaNo ratings yet
- Clases de FotogrametriaDocument21 pagesClases de FotogrametriaJared Melvin Palomino YupanquiNo ratings yet
- Examen de FotometriaDocument17 pagesExamen de FotometriaItalo Samaniego RimacheNo ratings yet
- Gerarquizacion de Los Metodos FotogrametricosDocument18 pagesGerarquizacion de Los Metodos FotogrametricosKarol JLNo ratings yet
- Jerarquizacion de Los Métodos FotogrametricosDocument5 pagesJerarquizacion de Los Métodos FotogrametricosAlexis Cabrera0% (1)
- Camaras Digitales y ScanerDocument45 pagesCamaras Digitales y ScanerJosue TPNo ratings yet
- Aerotriangulación Por HacesDocument4 pagesAerotriangulación Por HacesRonaldoNo ratings yet
- Fotogrametría DigitalDocument21 pagesFotogrametría DigitalLaura Arango ArévaloNo ratings yet
- Utilización de Observaciones GnssDocument14 pagesUtilización de Observaciones GnssBryan ArenasNo ratings yet
- Desarrollo de Equipos de Restitucion FotogrametricaDocument8 pagesDesarrollo de Equipos de Restitucion FotogrametricaJuan Camilo Robayo0% (1)
- Corrección geométrica RPAS generación mapa 1:1000Document3 pagesCorrección geométrica RPAS generación mapa 1:1000jose emilio guardiaNo ratings yet
- Fotogrametría y fotointerpretaciónDocument23 pagesFotogrametría y fotointerpretaciónJhonatan SuárezNo ratings yet
- FOTOGRAMETRÍADocument8 pagesFOTOGRAMETRÍADanny Herrera AyteNo ratings yet
- Control PID de nivel de estación mediante procesamiento de imágenesDocument3 pagesControl PID de nivel de estación mediante procesamiento de imágenesDiana ElizabethNo ratings yet
- Práctica - Análisis y Simulación de Un Sistema Digital Con MatlabDocument8 pagesPráctica - Análisis y Simulación de Un Sistema Digital Con MatlabTobe CabreraNo ratings yet
- Fotogrametria AereaDocument13 pagesFotogrametria Aereamayra dayana mamani gonzalesNo ratings yet
- DESARROLLO DE EQUIPOS DE FOTOGRAMETRÍA - Docx Informe.................Document19 pagesDESARROLLO DE EQUIPOS DE FOTOGRAMETRÍA - Docx Informe.................Izquierdo SadithNo ratings yet
- Correccion A Las Imagenes Satelitales PDFDocument10 pagesCorreccion A Las Imagenes Satelitales PDFJakelyne IrinaNo ratings yet
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsFrom EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsNo ratings yet
- Tesis - Cieza Silva José MiguelDocument84 pagesTesis - Cieza Silva José MiguelAlex AlanezNo ratings yet
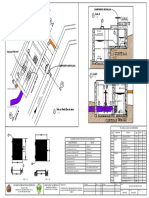
- p05 - Obra de TomaDocument1 pagep05 - Obra de TomaAlex AlanezNo ratings yet
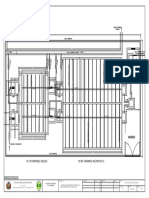
- P07 - TratamientoDocument1 pageP07 - TratamientoAlex AlanezNo ratings yet
- p05 - Obra de TomaDocument1 pagep05 - Obra de TomaAlex AlanezNo ratings yet
- p05 - Obra de TomaDocument1 pagep05 - Obra de TomaAlex AlanezNo ratings yet
- P06 - TratamientoDocument1 pageP06 - TratamientoAlex AlanezNo ratings yet
- P04 - PERFILES 4000 A 4926.78Document1 pageP04 - PERFILES 4000 A 4926.78Alex AlanezNo ratings yet
- P02 - PERFILES 0 A 2000Document1 pageP02 - PERFILES 0 A 2000Alex AlanezNo ratings yet
- Hidrologia Aplicada A Obra MenoresDocument28 pagesHidrologia Aplicada A Obra MenoresAlex AlanezNo ratings yet
- Coeficientes de Escorrentía PDFDocument0 pagesCoeficientes de Escorrentía PDFCaleChajaNo ratings yet
- P03 - PERFILES 2000 A 4000Document1 pageP03 - PERFILES 2000 A 4000Alex AlanezNo ratings yet
- Canales y Obras MenoresDocument26 pagesCanales y Obras MenoresAlex AlanezNo ratings yet
- Diseño de puente canal para canal de sección trapezoidalDocument20 pagesDiseño de puente canal para canal de sección trapezoidalAlex AlanezNo ratings yet
- P01 - Vista en PlantaDocument1 pageP01 - Vista en PlantaAlex AlanezNo ratings yet
- Presentacion Rapidas HidraulicasDocument36 pagesPresentacion Rapidas HidraulicasAlex AlanezNo ratings yet
- Normas construcción Bolivia lista preciosDocument4 pagesNormas construcción Bolivia lista preciosAlex AlanezNo ratings yet
- Matriz de LeopoldDocument2 pagesMatriz de LeopoldAlex AlanezNo ratings yet
- Marco LogicoDocument3 pagesMarco LogicoAlex AlanezNo ratings yet
- 5 RGRS PDFDocument24 pages5 RGRS PDFDavid Sánchez RaichNo ratings yet
- Os.090 Norma TecnicaDocument65 pagesOs.090 Norma TecnicaBilly Morris100% (1)
- LEY No 1333Document14 pagesLEY No 1333Juan Pablo Tenorio QuirozNo ratings yet
- 5 RGRS PDFDocument24 pages5 RGRS PDFDavid Sánchez RaichNo ratings yet
- Cpe BoliviaDocument94 pagesCpe BoliviaNandito TupizaNo ratings yet
- Catalogo 2011Document275 pagesCatalogo 2011Alex AlanezNo ratings yet
- L - 745 Decada Del RiegoDocument2 pagesL - 745 Decada Del RiegoAlex AlanezNo ratings yet