You might also like
- Hand Gesture Recognition Using Haar-WaveletDocument64 pagesHand Gesture Recognition Using Haar-WaveletJenkin WInstonNo ratings yet
- Aa PORTABLE ASSISTIVE DEVICE FOR DEAF DUMB AND BLIND USING AIDocument4 pagesAa PORTABLE ASSISTIVE DEVICE FOR DEAF DUMB AND BLIND USING AIMohammed Abdul Razzak100% (2)
- Hand Gesture Recognition SystemDocument55 pagesHand Gesture Recognition SystemHassan Javaid100% (2)
- Gesture RecognitionDocument24 pagesGesture RecognitionSenthamil SelvanNo ratings yet
- Implementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleDocument15 pagesImplementation of Hand Gesture Recognition System To Aid Deaf-Dumb PeopleSanjay ShelarNo ratings yet
- Software Requirements Specification - Sign Language To TextDocument19 pagesSoftware Requirements Specification - Sign Language To TextAman BindNo ratings yet
- Group No19A Sign Language RecognitionDocument30 pagesGroup No19A Sign Language RecognitionRajkumarNo ratings yet
- Facial Recognition Student Attendance System 2Document35 pagesFacial Recognition Student Attendance System 2jacknoob45No ratings yet
- Sign Language To Text-Speech Translator Using Machine LearningDocument5 pagesSign Language To Text-Speech Translator Using Machine LearningWARSE JournalsNo ratings yet
- Face Recognition Report PDFDocument16 pagesFace Recognition Report PDFTeja ReddyNo ratings yet
- Sign Language RecDocument7 pagesSign Language RecAbhishek PatilNo ratings yet
- Human Hand Gestures Capturing and Recognition Via CameraDocument64 pagesHuman Hand Gestures Capturing and Recognition Via CameraBharathNo ratings yet
- Convert Sign Language To SpeechDocument29 pagesConvert Sign Language To SpeechBon DokNo ratings yet
- Face Recognition and DetectionDocument38 pagesFace Recognition and Detectionchaithra580No ratings yet
- VSP GowthamiDocument19 pagesVSP Gowthamigowthami gowthamiNo ratings yet
- Face Detection and Recognition in Indoor Environment Using Color Modeling, Haar Features and Local Binary PatternsDocument59 pagesFace Detection and Recognition in Indoor Environment Using Color Modeling, Haar Features and Local Binary PatternsHan Hang Yong100% (3)
- Sign Language To Voice ConverterDocument13 pagesSign Language To Voice ConverterAnoop K VenuNo ratings yet
- Smart Voice Assistant (7th Sem Project)Document12 pagesSmart Voice Assistant (7th Sem Project)Aniket SharmaNo ratings yet
- Skinput TechnologyDocument22 pagesSkinput Technologyprashanth100% (1)
- Understanding Deaf and Dumb CommunicationDocument30 pagesUnderstanding Deaf and Dumb CommunicationMazhar IqbalNo ratings yet
- Face Recognition TechnologyDocument33 pagesFace Recognition Technologymshibas83% (6)
- Bus Detection For Blind PeopleDocument6 pagesBus Detection For Blind PeoplefathimaNo ratings yet
- VOICE AUTHENTICATIONDocument9 pagesVOICE AUTHENTICATIONamardeepsinghseeraNo ratings yet
- Fingerprint Verification System Seminar ReportDocument32 pagesFingerprint Verification System Seminar ReportKedar Patil100% (1)
- Convolution Neural Networks For Hand Gesture RecognationDocument5 pagesConvolution Neural Networks For Hand Gesture RecognationIAES IJAINo ratings yet
- BTP Report On Text To Image SynthesisDocument62 pagesBTP Report On Text To Image SynthesisAMIT MANCHANDANo ratings yet
- Face Detection by Using OpenCVDocument4 pagesFace Detection by Using OpenCVvickey rajputNo ratings yet
- Sign Language Character Recognition Research PaperDocument5 pagesSign Language Character Recognition Research PaperVanilla SugaNo ratings yet
- Hand Gesture Based Wireless Controlled RobotDocument25 pagesHand Gesture Based Wireless Controlled RobotGuru Vashist80% (5)
- Deep Learning Based Sign Language Recognition System Using Convolutional Neural NetworkDocument68 pagesDeep Learning Based Sign Language Recognition System Using Convolutional Neural Networkcse 2k21No ratings yet
- Sign Language RecognitionDocument13 pagesSign Language RecognitionlohitNo ratings yet
- Face Detection and Face RecognitionDocument7 pagesFace Detection and Face RecognitionPranshu AgrawalNo ratings yet
- Project Report-Final Yr (6months) - EshanDocument52 pagesProject Report-Final Yr (6months) - EshanAshish Shukla25% (4)
- Indian Sign Language Recognition SystemDocument3 pagesIndian Sign Language Recognition SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Speech To Text ConversionDocument34 pagesSpeech To Text ConversionChetan AroraNo ratings yet
- Software Requirements Specification: COMSATS University Islamabad, COMSATS Road, Off GT Road, Sahiwal, PakistanDocument13 pagesSoftware Requirements Specification: COMSATS University Islamabad, COMSATS Road, Off GT Road, Sahiwal, PakistanFarah QandeelNo ratings yet
- Seminar DocumentationDocument8 pagesSeminar DocumentationKarthik PrabhuNo ratings yet
- Ethiopian Sign Language Conversion SystemDocument86 pagesEthiopian Sign Language Conversion SystemAmanuel KassaNo ratings yet
- Virtual Mouse Control Using A Web CameraDocument14 pagesVirtual Mouse Control Using A Web CameraThennarasu Ramachandran100% (1)
- Virtual Smart PhoneDocument3 pagesVirtual Smart PhoneInternational Journal of Innovative Science and Research Technology67% (3)
- Dermatological Disorder Detection Using Machine LearningDocument4 pagesDermatological Disorder Detection Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- COMSATS University Lahore Campus project detects skin diseasesDocument7 pagesCOMSATS University Lahore Campus project detects skin diseasesHA StudioNo ratings yet
- File 4Document60 pagesFile 4AVADHESH CHAMOLANo ratings yet
- Extracting Face From Live FeedDocument53 pagesExtracting Face From Live FeedShanu PrakashNo ratings yet
- Hand Gesture RecognitionDocument11 pagesHand Gesture RecognitionKuldeep Singh100% (1)
- Palm Vein Technology AbstractDocument13 pagesPalm Vein Technology Abstractmdayyub82% (11)
- Final Year Project Phase 1 ReportDocument25 pagesFinal Year Project Phase 1 ReportAman SharmaNo ratings yet
- Automatic Detection and Notification of Potholes and Humps To Aid Driver Mini ProjectDocument52 pagesAutomatic Detection and Notification of Potholes and Humps To Aid Driver Mini ProjectMd Sumair Khan100% (1)
- Arduino Based RADAR SystemDocument33 pagesArduino Based RADAR SystemKamalJeet Singh100% (5)
- JARVISDocument6 pagesJARVISTank AbhishekNo ratings yet
- Ocr With Machine LearningDocument6 pagesOcr With Machine LearningNayab AmjadNo ratings yet
- Face RecognitionDocument17 pagesFace RecognitionMomo Nasr100% (2)
- Face Recognition Report 1Document26 pagesFace Recognition Report 1Binny DaraNo ratings yet
- Speech Emotion Recognition Using Neural NetworksDocument28 pagesSpeech Emotion Recognition Using Neural Networkssubbs reddyNo ratings yet
- Hand Gesture To Speech TranslationDocument37 pagesHand Gesture To Speech TranslationRohan SNo ratings yet
- Image FusionDocument86 pagesImage FusionAbhishek Reddy GarlapatiNo ratings yet
- 453 Deep CNN Based Blind Image Quality PredictorDocument75 pages453 Deep CNN Based Blind Image Quality Predictorsundhar kurukuriNo ratings yet
- Gesture Volume Control Project SynopsisDocument5 pagesGesture Volume Control Project SynopsisVashu MalikNo ratings yet
- Dynamic Hand Gesture Recognition A Literature ReviewDocument8 pagesDynamic Hand Gesture Recognition A Literature Reviewc5r3aep1No ratings yet
- Hand Gesture Recognition Research PapersDocument5 pagesHand Gesture Recognition Research Paperseh15arsx100% (1)
- LED tube light specification and featuresDocument4 pagesLED tube light specification and featuresJayaprakash JayaramanNo ratings yet
- Healthcare Compliance Code For COVID-19: PrefaceDocument9 pagesHealthcare Compliance Code For COVID-19: PrefaceJayaprakash JayaramanNo ratings yet
- The Use of Counseling and Discipline To Improve Employee ProductivityDocument25 pagesThe Use of Counseling and Discipline To Improve Employee ProductivityJayaprakash JayaramanNo ratings yet
- Discipline in The Workplace PDFDocument60 pagesDiscipline in The Workplace PDFEvi SiraitNo ratings yet
- Catalog PDFDocument56 pagesCatalog PDFramNo ratings yet
- Group Timing TechniqueDocument3 pagesGroup Timing TechniqueJayaprakash JayaramanNo ratings yet
- LightLevels Outdoor+indoor PDFDocument5 pagesLightLevels Outdoor+indoor PDFMauricio Cesar Molina ArtetaNo ratings yet
- Universe Chart For KidsDocument1 pageUniverse Chart For KidsJayaprakash JayaramanNo ratings yet
- Lirik and Chord LaguDocument5 pagesLirik and Chord LaguRyan D'Stranger UchihaNo ratings yet
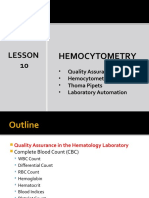
- (Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetsDocument22 pages(Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetselleNo ratings yet
- Numark MixTrack Pro II Traktor ProDocument3 pagesNumark MixTrack Pro II Traktor ProSantiCai100% (1)
- UNIT: 01 Housekeeping SupervisionDocument91 pagesUNIT: 01 Housekeeping SupervisionRamkumar RamkumarNo ratings yet
- PDF Reply Position Paper For ComplainantDocument4 pagesPDF Reply Position Paper For ComplainantSheron Biase100% (1)
- Norms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightDocument4 pagesNorms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightKumar AvinashNo ratings yet
- Rust Experimental v2017 DevBlog 179 x64 #KnightsTableDocument2 pagesRust Experimental v2017 DevBlog 179 x64 #KnightsTableIngrutinNo ratings yet
- Examination: Subject CT5 - Contingencies Core TechnicalDocument7 pagesExamination: Subject CT5 - Contingencies Core TechnicalMadonnaNo ratings yet
- Pass Issuance Receipt: Now You Can Also Buy This Pass On Paytm AppDocument1 pagePass Issuance Receipt: Now You Can Also Buy This Pass On Paytm AppAnoop SharmaNo ratings yet
- Leyte Geothermal v. PNOCDocument3 pagesLeyte Geothermal v. PNOCAllen Windel BernabeNo ratings yet
- Lesson 3 - Materials That Undergo DecayDocument14 pagesLesson 3 - Materials That Undergo DecayFUMIKO SOPHIA67% (6)
- cp2021 Inf03p02Document242 pagescp2021 Inf03p02bahbaguruNo ratings yet
- Risk Ology ManualDocument2 pagesRisk Ology ManualGregoryNo ratings yet
- Building A Computer AssignmentDocument3 pagesBuilding A Computer AssignmentRajaughn GunterNo ratings yet
- Ultrasonic Examination of Heavy Steel Forgings: Standard Practice ForDocument7 pagesUltrasonic Examination of Heavy Steel Forgings: Standard Practice ForbatataNo ratings yet
- University Assignment Report CT7098Document16 pagesUniversity Assignment Report CT7098Shakeel ShahidNo ratings yet
- PaySlip ProjectDocument2 pagesPaySlip Projectharishgogula100% (1)
- RF Power Measurements Basic PrinciplesDocument27 pagesRF Power Measurements Basic PrinciplesHector Velasco100% (1)
- Anomaly Sell Out Remap December 2019 S SUMATRA & JAMBIDocument143 pagesAnomaly Sell Out Remap December 2019 S SUMATRA & JAMBITeteh Nha' DwieNo ratings yet
- LNGC Q-Flex Al Rekayyat - Imo 9397339 - Machinery Operating ManualDocument581 pagesLNGC Q-Flex Al Rekayyat - Imo 9397339 - Machinery Operating Manualseawolf50No ratings yet
- Checklist PBL 2Document3 pagesChecklist PBL 2Hazrina AwangNo ratings yet
- Hindustan Coca ColaDocument63 pagesHindustan Coca ColaAksMastNo ratings yet
- What Role Can IS Play in The Pharmaceutical Industry?Document4 pagesWhat Role Can IS Play in The Pharmaceutical Industry?Đức NguyễnNo ratings yet
- Optimize Coverage and Performance with 12dB MTMA AmplifierDocument3 pagesOptimize Coverage and Performance with 12dB MTMA AmplifierpecqueurNo ratings yet
- Lab - Activity CCNA 2 Exp: 7.5.3Document13 pagesLab - Activity CCNA 2 Exp: 7.5.3Rico Agung FirmansyahNo ratings yet
- Micro Controller AbstractDocument6 pagesMicro Controller AbstractryacetNo ratings yet
- Method StatementDocument11 pagesMethod StatementMohammad Fazal Khan100% (1)
- Proprietar Utilizator Nr. Crt. Numar Inmatriculare Functie Utilizator Categorie AutovehiculDocument3 pagesProprietar Utilizator Nr. Crt. Numar Inmatriculare Functie Utilizator Categorie Autovehicultranspol2023No ratings yet
- UPGRADEDocument2 pagesUPGRADEVedansh OswalNo ratings yet
- Javascript: What You Should Already KnowDocument6 pagesJavascript: What You Should Already KnowKannan ParthasarathiNo ratings yet
- Be Useful: Seven Tools for Life by Arnold Schwarzenegger: Key Takeaways, Summary & AnalysisFrom EverandBe Useful: Seven Tools for Life by Arnold Schwarzenegger: Key Takeaways, Summary & AnalysisNo ratings yet
- Jack Watson's Complete Guide to Creating Black and White Female Glamour Images - From Nudes to FashionFrom EverandJack Watson's Complete Guide to Creating Black and White Female Glamour Images - From Nudes to FashionRating: 2.5 out of 5 stars2.5/5 (3)
- Betty Page Confidential: Featuring Never-Before Seen PhotographsFrom EverandBetty Page Confidential: Featuring Never-Before Seen PhotographsRating: 3.5 out of 5 stars3.5/5 (39)
- Edward's Menagerie: Dogs: 50 canine crochet patternsFrom EverandEdward's Menagerie: Dogs: 50 canine crochet patternsRating: 3 out of 5 stars3/5 (5)
- Street Photography: The Art of Capturing the Candid MomentFrom EverandStreet Photography: The Art of Capturing the Candid MomentRating: 4 out of 5 stars4/5 (12)
- How to Photograph Everything: Simple Techniques for Shooting Spectacular ImagesFrom EverandHow to Photograph Everything: Simple Techniques for Shooting Spectacular ImagesRating: 4 out of 5 stars4/5 (2)
- The Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversFrom EverandThe Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversRating: 4 out of 5 stars4/5 (1)
- Dinosaurs: 101 Super Fun Facts And Amazing Pictures (Featuring The World's Top 16 Dinosaurs)From EverandDinosaurs: 101 Super Fun Facts And Amazing Pictures (Featuring The World's Top 16 Dinosaurs)Rating: 4 out of 5 stars4/5 (6)
- Food Styling and Photography For DummiesFrom EverandFood Styling and Photography For DummiesRating: 4 out of 5 stars4/5 (5)
- The Portrait: Understanding Portrait PhotographyFrom EverandThe Portrait: Understanding Portrait PhotographyRating: 4 out of 5 stars4/5 (5)
- White and Faded: Restoring Beauty in Your Home and LifeFrom EverandWhite and Faded: Restoring Beauty in Your Home and LifeNo ratings yet
- Vivian Maier: A Photographer’s Life and AfterlifeFrom EverandVivian Maier: A Photographer’s Life and AfterlifeRating: 3.5 out of 5 stars3.5/5 (8)
- The Art of Photography: A Personal Approach to Artistic ExpressionFrom EverandThe Art of Photography: A Personal Approach to Artistic ExpressionRating: 4.5 out of 5 stars4.5/5 (3)
- Photographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyFrom EverandPhotographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyRating: 4.5 out of 5 stars4.5/5 (7)
- Bug Eyes - All Bugged Out: Insects, Spiders and Bug Facts for KidsFrom EverandBug Eyes - All Bugged Out: Insects, Spiders and Bug Facts for KidsNo ratings yet
- Stargazing: Beginner’s guide to astronomyFrom EverandStargazing: Beginner’s guide to astronomyRating: 5 out of 5 stars5/5 (1)
- The Successful Professional Photographer: How to Stand Out, Get Hired, and Make Real Money as a Portrait or Wedding PhotographerFrom EverandThe Successful Professional Photographer: How to Stand Out, Get Hired, and Make Real Money as a Portrait or Wedding PhotographerRating: 5 out of 5 stars5/5 (1)
- The Essence of Photography: Seeing and CreativityFrom EverandThe Essence of Photography: Seeing and CreativityRating: 5 out of 5 stars5/5 (5)