You might also like
- State FunctionDocument15 pagesState FunctionmelprvnNo ratings yet
- YDocument16 pagesYsome logicalNo ratings yet
- Time-Averaged Governing Equations For TurbulenceDocument9 pagesTime-Averaged Governing Equations For TurbulenceMinu.j.jNo ratings yet
- VI. Auxiliary FunctionsDocument21 pagesVI. Auxiliary FunctionsAnshu Kumar Gupta100% (4)
- PMS Experiment 1-Gravity Flow TankDocument17 pagesPMS Experiment 1-Gravity Flow Tank815 PAVANNo ratings yet
- 1 Math ModelDocument13 pages1 Math ModelTarek AliNo ratings yet
- World: Lecture NotesDocument26 pagesWorld: Lecture Notesrakheep123No ratings yet
- Differential Analysis of Fluid FlowDocument42 pagesDifferential Analysis of Fluid FlowAmr Faisal RaghebNo ratings yet
- (Control Engineering) : State Variables and State-Space Representation"Document13 pages(Control Engineering) : State Variables and State-Space Representation"Nasir AliNo ratings yet
- Mathematical Models, DOF and Nolinear Equations-2Document67 pagesMathematical Models, DOF and Nolinear Equations-2Adil JuttNo ratings yet
- De Nition of System StateDocument14 pagesDe Nition of System Stateglenda_hernandez09No ratings yet
- MODELING CONTROL SYSTEMSDocument11 pagesMODELING CONTROL SYSTEMSAnonymous UrzdtCB0INo ratings yet
- Major equations of state overviewDocument12 pagesMajor equations of state overviewDHe Vic'zNo ratings yet
- William C. Davis - Equation of State For Detonation ProductsDocument10 pagesWilliam C. Davis - Equation of State For Detonation ProductsFraosmNo ratings yet
- Theoretical Models of Chemical ProcessesDocument21 pagesTheoretical Models of Chemical Processesstup_30100% (2)
- Module 3 - Integral AnalysisDocument7 pagesModule 3 - Integral Analysiskdnji123No ratings yet
- Module - 1 - Models in Engineering and Equation FormsDocument29 pagesModule - 1 - Models in Engineering and Equation FormsG MahendraNo ratings yet
- Simulation of Process Lines in Microsoft Excel - Nitric Acid ProductionDocument16 pagesSimulation of Process Lines in Microsoft Excel - Nitric Acid ProductionmanojNo ratings yet
- Dynamic System Modeling and Control - Hugh JackDocument1,016 pagesDynamic System Modeling and Control - Hugh Jackjiugarte1100% (2)
- Out2t1 PDFDocument27 pagesOut2t1 PDFAjay Nath S ANo ratings yet
- Thermo PDFDocument129 pagesThermo PDFbansallove2008No ratings yet
- Mass EnergyDocument64 pagesMass EnergyhlvijaykumarNo ratings yet
- Lecture-3 Modeling in Time DomainDocument24 pagesLecture-3 Modeling in Time DomainRayana ray0% (1)
- TH - 4 Thermal Engineering-I: Chapter - 1 Thermodynamic Concept & TerminologyDocument20 pagesTH - 4 Thermal Engineering-I: Chapter - 1 Thermodynamic Concept & Terminologysaritprava sahooNo ratings yet
- Mathematical ModelingDocument8 pagesMathematical ModelingMourougapragash SubramanianNo ratings yet
- Partition function (statistical mechanics) explainedDocument8 pagesPartition function (statistical mechanics) explainedankurNo ratings yet
- Time-Averaged Governing Equations For Turbulence: From Thermal-FluidspediaDocument5 pagesTime-Averaged Governing Equations For Turbulence: From Thermal-FluidspediaAnand JaiswalNo ratings yet
- Dimensionless Expressions: 4.1 Dimensional AnalysisDocument16 pagesDimensionless Expressions: 4.1 Dimensional AnalysisNoorul AlamNo ratings yet
- Phase DiagramsDocument55 pagesPhase DiagramsNeelu TiruvayipatiNo ratings yet
- Automatic Control 2 NotesDocument28 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- System ModelingDocument9 pagesSystem ModelingFyaNo ratings yet
- Course Code: KKEK 3152 Modeling of Chemical ProcessesDocument47 pagesCourse Code: KKEK 3152 Modeling of Chemical ProcessesRishi KumarNo ratings yet
- Fundamental Ideas of ThermodynamicsDocument214 pagesFundamental Ideas of ThermodynamicsdearsaswatNo ratings yet
- Thermodynamic Models & Physical Properties: Property Method SelectionDocument24 pagesThermodynamic Models & Physical Properties: Property Method SelectiondoufethiNo ratings yet
- Thermodynamic ModelsDocument24 pagesThermodynamic ModelsSampathkumar AttuluriNo ratings yet
- 04 Transfer FunctionDocument4 pages04 Transfer FunctionJosue MarshallNo ratings yet
- Control VolumeDocument2 pagesControl VolumeGirindra_WNo ratings yet
- Heat Transfer Kakac For Class 1Document10 pagesHeat Transfer Kakac For Class 1guhanvel4420No ratings yet
- Lecture 1a - Basics of ThermodynamicsDocument4 pagesLecture 1a - Basics of ThermodynamicsMuhammad Usman Saifullah KhanNo ratings yet
- Concept of ThermalDocument19 pagesConcept of ThermalAamirqadriNo ratings yet
- Fluid Mechanics Lecture Notes on Similarity and Dimensional AnalysisDocument15 pagesFluid Mechanics Lecture Notes on Similarity and Dimensional AnalysisAlsharksi AviationNo ratings yet
- Lec34 PDFDocument15 pagesLec34 PDFRitu SinghNo ratings yet
- Aerodynamics Similarity Rules Reduce VariablesDocument15 pagesAerodynamics Similarity Rules Reduce VariablesRitu SinghNo ratings yet
- Introduction To Applid ThermodynamicsDocument17 pagesIntroduction To Applid ThermodynamicsFarouk BassaNo ratings yet
- Dimensional Analysis and Scaling: 1.1 Mathematical ModelsDocument29 pagesDimensional Analysis and Scaling: 1.1 Mathematical ModelslynnetanNo ratings yet
- Create Models of Engineering Systems TutorialDocument28 pagesCreate Models of Engineering Systems TutorialarietoxNo ratings yet
- MODELING CHEMICAL PROCESSESDocument4 pagesMODELING CHEMICAL PROCESSESFatma CahyaniNo ratings yet
- Martinez Hw1Document6 pagesMartinez Hw1Fernando Arellano GuerreroNo ratings yet
- Introduction To ThermodynamicsDocument16 pagesIntroduction To ThermodynamicsFarouk BassaNo ratings yet
- Bounded Output Stability, Which Can Be Employed in The Design and Analysis of Process Control SystemsDocument8 pagesBounded Output Stability, Which Can Be Employed in The Design and Analysis of Process Control Systemsd_k_ÜNo ratings yet
- Elements 1Document5 pagesElements 1ckg rmyNo ratings yet
- Analysis and CompensationDocument25 pagesAnalysis and Compensationshaho1946No ratings yet
- Mathematical Modeling EssentialsDocument17 pagesMathematical Modeling Essentialskritika negiNo ratings yet
- Multiparameter Equations of State An Accurate Source of Thermodynamic Property Data Span 2000Document46 pagesMultiparameter Equations of State An Accurate Source of Thermodynamic Property Data Span 2000Fátima ReyesNo ratings yet
- Latent (Phase Change) Heating or Cooling: SolutionDocument2 pagesLatent (Phase Change) Heating or Cooling: SolutionEr Aniket DereNo ratings yet
- Algebraic Methods in Statistical Mechanics and Quantum Field TheoryFrom EverandAlgebraic Methods in Statistical Mechanics and Quantum Field TheoryNo ratings yet
- The Partition Method for a Power Series Expansion: Theory and ApplicationsFrom EverandThe Partition Method for a Power Series Expansion: Theory and ApplicationsNo ratings yet
- 2013 Ieee Iccic TemplateDocument3 pages2013 Ieee Iccic TemplateSaurabh K AgarwalNo ratings yet
- Paper formatting guideDocument3 pagesPaper formatting guideSaurabh K AgarwalNo ratings yet
- Ijert Paper FormatDocument3 pagesIjert Paper FormatmsloveindiaNo ratings yet
- Declaration of Originality PDFDocument1 pageDeclaration of Originality PDFSaurabh K AgarwalNo ratings yet
- SSC CHSLE-2013 Draft NoticeDocument32 pagesSSC CHSLE-2013 Draft NoticePabitra KumarNo ratings yet
- Format For Training Project & Seminar Report Guidelines For EC StudentsDocument7 pagesFormat For Training Project & Seminar Report Guidelines For EC StudentsSaurabh K AgarwalNo ratings yet
- Field & Area of Operation: C:/Users/admin/Downloads/adv For TH-2013Document10 pagesField & Area of Operation: C:/Users/admin/Downloads/adv For TH-2013Saurabh K AgarwalNo ratings yet
- PidcontrollersDocument46 pagesPidcontrollersnguyễn ngọc ánhNo ratings yet
- Manuscript No: XXXXXXXX Manuscript Title: A Sample Compliance ReportDocument1 pageManuscript No: XXXXXXXX Manuscript Title: A Sample Compliance ReportSaurabh K AgarwalNo ratings yet
- p6 4 1Document7 pagesp6 4 1Saurabh K AgarwalNo ratings yet
- RLS Parameter Estimation Linear ModelsDocument18 pagesRLS Parameter Estimation Linear ModelsSaurabh K AgarwalNo ratings yet
- RajhissiteDocument1 pageRajhissiteSaurabh K AgarwalNo ratings yet
- Adaptive Tuning of A Kalman Filter Via Fuzzy Logic For An Intelligent AUV Navigation System PDFDocument9 pagesAdaptive Tuning of A Kalman Filter Via Fuzzy Logic For An Intelligent AUV Navigation System PDFSaurabh K AgarwalNo ratings yet
- M.TECH THESIS GUIDELINESDocument9 pagesM.TECH THESIS GUIDELINESabhi_engg06No ratings yet
- tutorialEKF PDFDocument7 pagestutorialEKF PDFSaurabh K AgarwalNo ratings yet
- Syllabus M.Tech (Control & Instrumentation) PDFDocument8 pagesSyllabus M.Tech (Control & Instrumentation) PDFGAUTI2212No ratings yet
- MorisDocument1 pageMorisSaurabh K AgarwalNo ratings yet
- Electrical Measurement, Signal Processing, and DisplaysDocument1 pageElectrical Measurement, Signal Processing, and DisplaysSaurabh K AgarwalNo ratings yet
- MorisDocument1 pageMorisSaurabh K AgarwalNo ratings yet
- Microwave IntroDocument5 pagesMicrowave IntroSaurabh K AgarwalNo ratings yet
- AppendixB PDFDocument9 pagesAppendixB PDFnunun nurulNo ratings yet
- Transfluid Fluid Coupling CatalougeDocument32 pagesTransfluid Fluid Coupling CatalougeNaeem KhanNo ratings yet
- Missile Autopilot LateralDocument7 pagesMissile Autopilot LateralD.Viswanath100% (2)
- Hyperphysics Phy Astr Gsu EduDocument7 pagesHyperphysics Phy Astr Gsu EduProf Sujitkumar ManeNo ratings yet
- Kinematic Equations WorksheetDocument2 pagesKinematic Equations WorksheetTrevathan26No ratings yet
- Gears - General: Shigley's Mechanical Engineering DesignDocument229 pagesGears - General: Shigley's Mechanical Engineering DesignbasitNo ratings yet
- Circular Motion Problems: Kinematic: A V R ADocument7 pagesCircular Motion Problems: Kinematic: A V R AAshley De Leon100% (1)
- Metu NCC Fall Semester (2017-1) PHY 105 General Physics I (3580105) Course SyllabusDocument3 pagesMetu NCC Fall Semester (2017-1) PHY 105 General Physics I (3580105) Course SyllabusErgin ÖzdikicioğluNo ratings yet
- Stress Concentration Charts-3 PDFDocument9 pagesStress Concentration Charts-3 PDFAhmad SalahNo ratings yet
- SBVL Assignment2Document4 pagesSBVL Assignment2Nam PhuongNo ratings yet
- Karbon Ve Cam KarşılaştırmaDocument14 pagesKarbon Ve Cam KarşılaştırmaHasanmert KaymakNo ratings yet
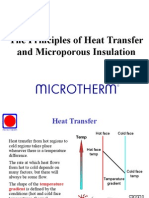
- The Principles of Heat Transfer and Microporous InsulationDocument26 pagesThe Principles of Heat Transfer and Microporous InsulationAbdul MajidNo ratings yet
- Hollow Core Diaphragm DesignDocument49 pagesHollow Core Diaphragm DesignMarcus LindonNo ratings yet
- Center of RigidityDocument1 pageCenter of Rigiditycocococo1No ratings yet
- 4 6021360109643367463 PDFDocument265 pages4 6021360109643367463 PDFEndayenewMollaNo ratings yet
- Conduction, Convection, RadiationDocument64 pagesConduction, Convection, RadiationMAx IMp BayuNo ratings yet
- Integración IV: Introducción A DWSIM 2018Document55 pagesIntegración IV: Introducción A DWSIM 2018willycoyote1990-1No ratings yet
- Isothermal Thermodynamic Processes Problems and SolutionsDocument1 pageIsothermal Thermodynamic Processes Problems and SolutionsBasic PhysicsNo ratings yet
- The Study of Misconceptions On Motion's Concept and Remediate Using Real Experiment Video AnalysisDocument7 pagesThe Study of Misconceptions On Motion's Concept and Remediate Using Real Experiment Video AnalysisPrima Warta SanthaliaNo ratings yet
- Group 1Document6 pagesGroup 1Mart Joseph Seno0% (1)
- 15.thermo Compressible Flow FM Objective by RajputDocument4 pages15.thermo Compressible Flow FM Objective by RajputMuruganantham MajesticNo ratings yet
- E6-165-13 - ASME STRESS CLASSIFICATION in Pressure Vessels and PipingDocument20 pagesE6-165-13 - ASME STRESS CLASSIFICATION in Pressure Vessels and PipingLuis Ortiz100% (3)
- 960 Physics (PPU - STPM) Semester 3 Topics-SyllabusDocument8 pages960 Physics (PPU - STPM) Semester 3 Topics-SyllabusJosh, LRTNo ratings yet
- Physics Formulary - WEVERS 1edDocument108 pagesPhysics Formulary - WEVERS 1edJ MartinNo ratings yet
- ElectromagneticsDocument4 pagesElectromagneticscisnarFNo ratings yet
- Seismic Behavior of Short Coupling Beams With Different Reinforcement LayoutsDocument10 pagesSeismic Behavior of Short Coupling Beams With Different Reinforcement LayoutsleotramontinNo ratings yet
- Physics FPRM Four NotesDocument122 pagesPhysics FPRM Four NotesCharles GhatiNo ratings yet
- Design of Slab BridgesDocument12 pagesDesign of Slab BridgesEna Mie CambaNo ratings yet
- ME421 Heat Exchanger and Steam Generator Design: Lecture Notes 6 Double-Pipe Heat ExchangersDocument19 pagesME421 Heat Exchanger and Steam Generator Design: Lecture Notes 6 Double-Pipe Heat ExchangersMeravigliorso76No ratings yet
- Class XI: Physics Chapter 10: Mechanical Properties of FluidsDocument7 pagesClass XI: Physics Chapter 10: Mechanical Properties of Fluidschandramohan muruganNo ratings yet