You might also like
- Cam AssemblyDocument1 pageCam AssemblyRakeshSainiNo ratings yet
- Fundamentals of RoboticsDocument26 pagesFundamentals of RoboticsRakeshSainiNo ratings yet
- Follower AssemblyDocument1 pageFollower AssemblyRakeshSainiNo ratings yet
- Optimization Desgin StudyDocument1 pageOptimization Desgin StudyRakeshSainiNo ratings yet
- Assignment 1: Sbuject: MCTD Last Date: 7/11/2016Document1 pageAssignment 1: Sbuject: MCTD Last Date: 7/11/2016RakeshSainiNo ratings yet
- Robot DynamicsDocument15 pagesRobot DynamicsRakeshSaini100% (1)
- MCTD TutorialDocument5 pagesMCTD TutorialRakeshSainiNo ratings yet
- ProE Lab Work 1 To 11Document11 pagesProE Lab Work 1 To 11RakeshSainiNo ratings yet
- Engineering Drawing Lab ManualDocument52 pagesEngineering Drawing Lab ManualRakeshSaini83% (6)
- Ultrasonic Machining (USM)Document19 pagesUltrasonic Machining (USM)RakeshSaini100% (2)
- Kinematics of RobotsDocument42 pagesKinematics of RobotsRakeshSainiNo ratings yet
- Cam Assignment 1Document2 pagesCam Assignment 1RakeshSainiNo ratings yet
- Nontraditional Manufacturing ProcessDocument57 pagesNontraditional Manufacturing ProcessRakeshSainiNo ratings yet
- Flexible Manufacturing Systems (FMS)Document40 pagesFlexible Manufacturing Systems (FMS)RakeshSaini100% (4)
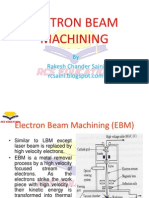
- Electron Beam Machining (EBM)Document8 pagesElectron Beam Machining (EBM)RakeshSaini100% (3)
- Cellular Manufacturing SystemDocument34 pagesCellular Manufacturing SystemRakeshSainiNo ratings yet
- Robot End EffectorDocument25 pagesRobot End EffectorRakeshSainiNo ratings yet
- Indian AutomobileDocument35 pagesIndian AutomobileRakeshSainiNo ratings yet
- Digital ManufacturingDocument33 pagesDigital ManufacturingRakeshSaini100% (1)
- CNCDocument43 pagesCNCRakeshSainiNo ratings yet
- Assembly Line BalancingDocument26 pagesAssembly Line BalancingRakeshSaini100% (4)
- Personnel ManagementDocument10 pagesPersonnel ManagementRakeshSainiNo ratings yet
- CASTING-Traditional Manufacturing ProcessesDocument51 pagesCASTING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Introdution CAD/CAMDocument27 pagesIntrodution CAD/CAMRakeshSainiNo ratings yet
- Computer Aided ManufacturingDocument72 pagesComputer Aided ManufacturingRakeshSaini100% (1)
- FORMING-Traditional Manufacturing ProcessesDocument38 pagesFORMING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Traction Control SystemDocument24 pagesTraction Control SystemRakeshSaini100% (1)
- SHEET METAL PROCESSING-Traditional Manufacturing ProcessesDocument14 pagesSHEET METAL PROCESSING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2015 Triangle Proofs Answers PDFDocument40 pages2015 Triangle Proofs Answers PDFLyann Rodelas100% (1)
- Time-Rates: Page - Differential Calculus Engr. Alberto F. ServitoDocument11 pagesTime-Rates: Page - Differential Calculus Engr. Alberto F. ServitoAbdul ShadulNo ratings yet
- Grade 12 Circle PPT Worksheet 13a 2021 - 2022Document29 pagesGrade 12 Circle PPT Worksheet 13a 2021 - 2022Devi DeviNo ratings yet
- Applications of Knot Theory in PhysicsDocument12 pagesApplications of Knot Theory in PhysicsMelvin CarterNo ratings yet
- Exercise: Creating and Editing Solid GeometryDocument11 pagesExercise: Creating and Editing Solid GeometrymuhannedNo ratings yet
- Problem Set 1Document6 pagesProblem Set 1eugenio100% (1)
- Skills in Mathematics Trigonometry For JEE Main and Advanced 2022Document399 pagesSkills in Mathematics Trigonometry For JEE Main and Advanced 2022Harshil Nagwani100% (3)
- Relative MotionDocument23 pagesRelative MotionkvinzonNo ratings yet
- 2011 Jan P1 QPDocument28 pages2011 Jan P1 QPMuhammad UsmanNo ratings yet
- MATH 9 Q4 Module 2 Trigonometric Ratios of Special AnglesDocument22 pagesMATH 9 Q4 Module 2 Trigonometric Ratios of Special AnglesEmmanuel Dela CruzNo ratings yet
- Learning Geometry PDFDocument2 pagesLearning Geometry PDFSaid BouzNo ratings yet
- College Physics EOC Questions Chapter 8Document9 pagesCollege Physics EOC Questions Chapter 8Sri RNo ratings yet
- Trigonometric Form of A Complex NumberDocument2 pagesTrigonometric Form of A Complex NumberAngelica Ibana VicencioNo ratings yet
- Chain Rule, Implicit Differentiation and Linear Approximation and DifferentialsDocument39 pagesChain Rule, Implicit Differentiation and Linear Approximation and Differentialsanon-923611100% (1)
- Notes4 PDFDocument30 pagesNotes4 PDFeyenirNo ratings yet
- Caribbean Examinations Council Secondary Education Certificate Examination Technical Drawing Paper0l - General ProficiencyDocument12 pagesCaribbean Examinations Council Secondary Education Certificate Examination Technical Drawing Paper0l - General Proficiencyilyas mursalinNo ratings yet
- Qqad - 2008Document71 pagesQqad - 2008api-19818421No ratings yet
- Worksheet 5.2-Slope Fields: Name - Date - PeriodDocument8 pagesWorksheet 5.2-Slope Fields: Name - Date - PeriodZachary LinNo ratings yet
- 5.1 Geo PacketDocument6 pages5.1 Geo PacketPramudith LiyanageNo ratings yet
- ANSI B89.3.1-1972 1979 Measurement of Out - of - RoundnessDocument36 pagesANSI B89.3.1-1972 1979 Measurement of Out - of - Roundness1975.venkat7685100% (1)
- Volume Calc For ContoursDocument9 pagesVolume Calc For Contourstheeta88No ratings yet
- Std09 Maths EM 2Document155 pagesStd09 Maths EM 2juli_naz100% (4)
- Sample Questions: Figure MatrixDocument5 pagesSample Questions: Figure MatrixAnkit KumarNo ratings yet
- Blue Print: Sa-Ii (Ix) : Mathematics.: MensurationDocument19 pagesBlue Print: Sa-Ii (Ix) : Mathematics.: Mensurationapi-243565143No ratings yet
- Test - 1: (Physics)Document56 pagesTest - 1: (Physics)Chandana InguvaNo ratings yet
- Trigonometry Plane&Solid Geometry: By: Engr. Roy Andrew GarciaDocument50 pagesTrigonometry Plane&Solid Geometry: By: Engr. Roy Andrew GarciaEraAlmen100% (1)
- TERM END ASSESSMENT II Answer KeyDocument6 pagesTERM END ASSESSMENT II Answer KeyShipra AroraNo ratings yet
- Trigonometry Homework: Find lengths and angles in right trianglesDocument2 pagesTrigonometry Homework: Find lengths and angles in right trianglesMalyka KNo ratings yet
- Latihan Coordinate Geometry Form 4Document26 pagesLatihan Coordinate Geometry Form 4Nur Saida Syamim FauziNo ratings yet
- Projectile Motion: Learning Activity Sheets (LAS)Document6 pagesProjectile Motion: Learning Activity Sheets (LAS)Franz Eugene Almodiente100% (3)