You might also like
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Practical Applications of Chopper DrivesDocument2 pagesPractical Applications of Chopper Drivesmplgmg0% (2)
- Design & Fabrication of 1-Ph Induction Motor Starter MANUALDocument5 pagesDesign & Fabrication of 1-Ph Induction Motor Starter MANUALSreenidhi SrungaramNo ratings yet
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- Index: Bandel Thermal Power Station Project Report 2009-2010Document46 pagesIndex: Bandel Thermal Power Station Project Report 2009-2010Debaditya Nath100% (1)
- Asynchronous Machines Tutorial Sheets (EL-208Document10 pagesAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNo ratings yet
- Part BDocument10 pagesPart BVenkat ManiNo ratings yet
- Introduction To DC GeneratorDocument119 pagesIntroduction To DC GeneratorFaraz HussainNo ratings yet
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 pagesIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantNo ratings yet
- Tutorial on single phase induction motor parameters and performanceDocument1 pageTutorial on single phase induction motor parameters and performanceHimanshu Saini0% (1)
- Typical Rod Gap ArresterDocument11 pagesTypical Rod Gap ArresterMuhammad Asif Iqbal100% (1)
- HV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilDocument6 pagesHV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilAdnan AliNo ratings yet
- HVDC Notes PDFDocument22 pagesHVDC Notes PDFupender raoNo ratings yet
- Thyristor Switch ApplicationsDocument6 pagesThyristor Switch ApplicationsThilina Jayaweera75% (4)
- Eeeviews: Unit Iv Synchronous Motor DrivesDocument26 pagesEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamNo ratings yet
- IDA - QuesbankDocument10 pagesIDA - QuesbankKavitha KaviNo ratings yet
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- Thyristor Switch ApplicationDocument4 pagesThyristor Switch ApplicationRiyah_Rae100% (5)
- Classification of Transmission LinesDocument15 pagesClassification of Transmission LinesJim Erol BancoroNo ratings yet
- MMME2104 Synchronous Generators Electrical ComponentsDocument38 pagesMMME2104 Synchronous Generators Electrical ComponentsMd Rodi BidinNo ratings yet
- Unit 3Document5 pagesUnit 3Narasimman DonNo ratings yet
- EE360 - Synchronous MachinesDocument85 pagesEE360 - Synchronous MachinesAliAl-jaziriNo ratings yet
- Transformers: An Introduction to Types, Components and OperationDocument32 pagesTransformers: An Introduction to Types, Components and OperationDr-Gurpreet KumarNo ratings yet
- Single-Phase Induction Generators PDFDocument11 pagesSingle-Phase Induction Generators PDFalokinxx100% (1)
- Induction GeneratorDocument12 pagesInduction GeneratorSumaira SaifNo ratings yet
- Calculating Induced Voltage in Parallel CablesDocument51 pagesCalculating Induced Voltage in Parallel CablesAhmed Sabri0% (1)
- DR BU Static Rotor Resistance ControlDocument4 pagesDR BU Static Rotor Resistance ControlSameer GulshanNo ratings yet
- Cycloconverter UpdateDocument6 pagesCycloconverter Updatesoulfusion85No ratings yet
- CYCLOCONVERTERDocument17 pagesCYCLOCONVERTERRachmat Guntur Dwi Putra100% (1)
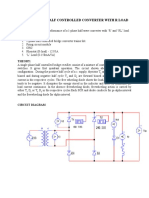
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- Three Phase ControlledDocument9 pagesThree Phase ControlledSaif HassanNo ratings yet
- Synchronous Generators - 2 Marks Questions and AnswersDocument3 pagesSynchronous Generators - 2 Marks Questions and AnswersJoseph Harindranath67% (3)
- M.g.say ch01Document5 pagesM.g.say ch01prabhjot singh150% (2)
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- Electrical Machines Interview QuestionsDocument8 pagesElectrical Machines Interview QuestionsRolan Simon Crisvir OrquiolaNo ratings yet
- Numerical Problems Synchronous MachinesDocument3 pagesNumerical Problems Synchronous MachinestusharNo ratings yet
- Full-Wave Controlled Rectifier RL Load (Discontinuous Mode)Document5 pagesFull-Wave Controlled Rectifier RL Load (Discontinuous Mode)hamza abdo mohamoud50% (4)
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- Machies Singly ExcitedDocument15 pagesMachies Singly ExcitedMohamed ElfekyNo ratings yet
- Question Bank EMDDocument23 pagesQuestion Bank EMDd_rajmtechNo ratings yet
- UNIT-V-Synchronous MachinesDocument51 pagesUNIT-V-Synchronous Machinessujith100% (1)
- Integral Cycle Speed Control of Single Phase Induction Motor.Document47 pagesIntegral Cycle Speed Control of Single Phase Induction Motor.lonemubashir50% (2)
- Flexible AC Transmission SystemDocument3 pagesFlexible AC Transmission SystemSatya SahaNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- Power Electronics 2 MarkDocument5 pagesPower Electronics 2 MarkPrakash Mahendran100% (2)
- Exp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerDocument7 pagesExp 1: OC and SC Test Along With Direct Load Test On A Single Phase TransformerSumit KatreNo ratings yet
- Prof. Ch. SAI BABU: Online Gate Coaching ClassesDocument103 pagesProf. Ch. SAI BABU: Online Gate Coaching ClassesHarish B. M.100% (1)
- DC-DC ConverterDocument24 pagesDC-DC ConverterkandularanjithNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Synchronous MotorsDocument25 pagesSynchronous MotorsParvesh NainNo ratings yet
- Single-Phase Induction MotorsDocument82 pagesSingle-Phase Induction MotorsVinay PrakashNo ratings yet
- Chopper 2003Document40 pagesChopper 2003Agus SetyawanNo ratings yet
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)From EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)No ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Chopper Controlled DC DrivesDocument6 pagesChopper Controlled DC DrivesKalum ChandraNo ratings yet
- Chopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaDocument8 pagesChopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaNipuna Thushara WijesekaraNo ratings yet
- Wind Design Example Wind Resorce Assesment Assesment: Project LocationDocument2 pagesWind Design Example Wind Resorce Assesment Assesment: Project LocationIsuru Pasan DasanayakeNo ratings yet
- Wind Design Example Wind Resorce Assesment Assesment: Project LocationDocument2 pagesWind Design Example Wind Resorce Assesment Assesment: Project LocationIsuru Pasan DasanayakeNo ratings yet
- Thyristor Switch Operation 090075MDocument6 pagesThyristor Switch Operation 090075MIsuru Pasan Dasanayake100% (1)
- 090075m - Pneumatic Control SystemsDocument5 pages090075m - Pneumatic Control SystemsIsuru Pasan Dasanayake100% (1)
- V.I.P. Dasanayake Capacitance - 2Document6 pagesV.I.P. Dasanayake Capacitance - 2Isuru Pasan DasanayakeNo ratings yet
- Syncronous P DasanayakeDocument11 pagesSyncronous P DasanayakeIsuru Pasan DasanayakeNo ratings yet
- Stepper P DasanayakeDocument9 pagesStepper P DasanayakeIsuru Pasan Dasanayake100% (2)
- Breadown of Air P DasanayakeDocument8 pagesBreadown of Air P DasanayakeIsuru Pasan DasanayakeNo ratings yet
- Fault Study 090075MDocument15 pagesFault Study 090075MIsuru Pasan Dasanayake100% (4)
- Corona CharacteristicsDocument7 pagesCorona CharacteristicsIsuru Pasan Dasanayake67% (3)
- V.I.P. Dasanayake CapacitanceDocument5 pagesV.I.P. Dasanayake CapacitanceIsuru Pasan Dasanayake100% (1)
- V.I.P. DasanayakeDocument4 pagesV.I.P. DasanayakeIsuru Pasan DasanayakeNo ratings yet
- Lec6 MobileRobotControlDocument5 pagesLec6 MobileRobotControlIsuru Pasan DasanayakeNo ratings yet
- V.I.P. Dasanayake - Computer SystemDocument12 pagesV.I.P. Dasanayake - Computer SystemIsuru Pasan Dasanayake100% (1)
- V.I.P. Dasanayake Mechanical Design of Overhead Transmission LinesDocument4 pagesV.I.P. Dasanayake Mechanical Design of Overhead Transmission LinesIsuru Pasan Dasanayake100% (1)
- Submission To The Queensland Competition Authority (QCA) : Electricity Distribution: Ring Fencing GuidelinesDocument7 pagesSubmission To The Queensland Competition Authority (QCA) : Electricity Distribution: Ring Fencing GuidelinesIsuru Pasan DasanayakeNo ratings yet
- V.I.P. Dasanayake Suspension Insulator StringDocument8 pagesV.I.P. Dasanayake Suspension Insulator StringIsuru Pasan DasanayakeNo ratings yet
- What Are The Advantages and Disadvantages of Radial and Ring Distribution? Radial Distribution SystemDocument5 pagesWhat Are The Advantages and Disadvantages of Radial and Ring Distribution? Radial Distribution SystemIsuru Pasan DasanayakeNo ratings yet
- Practical Schedule v6Document1 pagePractical Schedule v6Isuru Pasan DasanayakeNo ratings yet
- Lec5 Robot SensorsDocument6 pagesLec5 Robot SensorsIsuru Pasan DasanayakeNo ratings yet
- Load and Diversity FactorDocument4 pagesLoad and Diversity FactorIsuru Pasan DasanayakeNo ratings yet
- Motor Control: Case Study: MIT Handy BoardDocument6 pagesMotor Control: Case Study: MIT Handy BoardIsuru Pasan DasanayakeNo ratings yet
- Measurement of PowerDocument10 pagesMeasurement of PowerIsuru Pasan DasanayakeNo ratings yet
- Rating of MCBsDocument4 pagesRating of MCBsIsuru Pasan DasanayakeNo ratings yet
- Measuring BridgesDocument5 pagesMeasuring BridgesIsuru Pasan DasanayakeNo ratings yet
- Single Phase TransformerDocument13 pagesSingle Phase TransformerIsuru Pasan DasanayakeNo ratings yet
- Test On A Single Phase Transformer: Ranasinghe R.A.D.P. Rathnayaka R.M.C. Wijethilaka D.T.B. Wikramaarachchi G.TDocument5 pagesTest On A Single Phase Transformer: Ranasinghe R.A.D.P. Rathnayaka R.M.C. Wijethilaka D.T.B. Wikramaarachchi G.TIsuru Pasan DasanayakeNo ratings yet
- Sonar CharacteristicsDocument6 pagesSonar CharacteristicsIsuru Pasan DasanayakeNo ratings yet
- Test On A Single Phase TransformerDocument4 pagesTest On A Single Phase TransformerIsuru Pasan DasanayakeNo ratings yet
- SNP Tanker ReportDocument3 pagesSNP Tanker ReportfikrifadzalNo ratings yet
- Eurosun2014-Proceedings - ImportentDocument1,524 pagesEurosun2014-Proceedings - ImportentAkhileshkumar PandeyNo ratings yet
- 1%5 Corrosion Fatigue: Y-Z. WangDocument12 pages1%5 Corrosion Fatigue: Y-Z. WangMuhammad Idrus Abdul BasirNo ratings yet
- Ideal Gas Law LabDocument12 pagesIdeal Gas Law LabAudric Zuriel CruzNo ratings yet
- Question Bank SMDocument10 pagesQuestion Bank SMamurugan_22No ratings yet
- Why Is The Sky BlueDocument2 pagesWhy Is The Sky BlueTongboNo ratings yet
- Quality Characteristics of Biodiesel Produced From Used Cooking Oil in Southern EuropeDocument13 pagesQuality Characteristics of Biodiesel Produced From Used Cooking Oil in Southern EuropeRemzi GömekNo ratings yet
- Dental Polymers GuideDocument117 pagesDental Polymers GuideLalit KumarNo ratings yet
- EasyMethodforTestingTransformerDifferentialRel PDFDocument15 pagesEasyMethodforTestingTransformerDifferentialRel PDFAgam Rodhi AditiawarmanNo ratings yet
- IGCSE Term 2 Assessment - Date sheetDocument7 pagesIGCSE Term 2 Assessment - Date sheetKausthubhi KillamsettiNo ratings yet
- EasyPact CVS - LV510804Document3 pagesEasyPact CVS - LV510804Mouath AlraoushNo ratings yet
- Final Diesel DesignDocument111 pagesFinal Diesel DesignJerome JeremiasNo ratings yet
- GV Actuator Adv. Rev.4 (Webinar)Document37 pagesGV Actuator Adv. Rev.4 (Webinar)Boriche DivitisNo ratings yet
- The Effect of Heat On Matter (Melting&Freezing) .Ppt2Document17 pagesThe Effect of Heat On Matter (Melting&Freezing) .Ppt2Farah Dinah HassanNo ratings yet
- Mobile Phone Charger Using Wind Energy: AbstractDocument8 pagesMobile Phone Charger Using Wind Energy: AbstractYaswanthNo ratings yet
- AT S C55/65: Step 4 Installation and CommissioningDocument2 pagesAT S C55/65: Step 4 Installation and CommissioningVENTAS AGROPOCULONNo ratings yet
- Light Energy Lesson Plan: Students Will Students Will Describe HowDocument3 pagesLight Energy Lesson Plan: Students Will Students Will Describe HowolamhenNo ratings yet
- Hatz ManualDocument53 pagesHatz ManualCubi Masinska ObradaNo ratings yet
- Steam Generator HDocument2 pagesSteam Generator HNoor NoorNo ratings yet
- Energy Star Kids PrintDocument16 pagesEnergy Star Kids Printbala gamerNo ratings yet
- B Voc Renewable EnergyDocument4 pagesB Voc Renewable EnergyBlessy JoyNo ratings yet
- FullReport Status Quo Analysis of Various Segments of Electric Mobility-CompressedDocument342 pagesFullReport Status Quo Analysis of Various Segments of Electric Mobility-CompressedNishi MandaviaNo ratings yet
- Risk Assessment for Motor MaintenanceDocument1 pageRisk Assessment for Motor MaintenanceAbdul HadiNo ratings yet
- India-Iran Relations Progress Problems and ProspecDocument53 pagesIndia-Iran Relations Progress Problems and Prospecمريم جاسمNo ratings yet
- ALPAM DrakaDocument1 pageALPAM Drakaamir11601No ratings yet
- Basic Sight Words Individual CardDocument12 pagesBasic Sight Words Individual CardSheryl David PanganNo ratings yet
- Sheet 5Document5 pagesSheet 5Mohamed AbdulazimNo ratings yet
- Catalogo Process Heating 042018Document9 pagesCatalogo Process Heating 042018SreekanthNo ratings yet
- Centrifugal Pump Dimensional SpecificationsDocument36 pagesCentrifugal Pump Dimensional SpecificationsGustavo Adolfo Quintero RuizNo ratings yet
- Steering SysemDocument40 pagesSteering SysemDat100% (3)