You might also like
- Ppdot CangahuaDocument128 pagesPpdot CangahuaVictor David Jaramillo MejíaNo ratings yet
- Censo 2005Document230 pagesCenso 2005Victor David Jaramillo MejíaNo ratings yet
- Analisis Exploratorio de Datos Espaciales Al Servicio Del GeomarketingDocument21 pagesAnalisis Exploratorio de Datos Espaciales Al Servicio Del GeomarketingVictor David Jaramillo MejíaNo ratings yet
- Schejtman y Berdegue PDFDocument54 pagesSchejtman y Berdegue PDFsaravictoriacorreaNo ratings yet
- La Caja de Herramientas de La Prospectiva Estratégica GodetDocument114 pagesLa Caja de Herramientas de La Prospectiva Estratégica Godetapi-3748205100% (7)
- Prospectiva EstrategicaDocument156 pagesProspectiva EstrategicaMiguel Soto100% (2)
- UIOISDHKSDHDocument10 pagesUIOISDHKSDHVictor David Jaramillo MejíaNo ratings yet
- Jsaldajs 2012Document11 pagesJsaldajs 2012Victor David Jaramillo MejíaNo ratings yet
- Informe SMIC ProbExpert PDFDocument16 pagesInforme SMIC ProbExpert PDFVictor David Jaramillo MejíaNo ratings yet
- Analisis EspacialDocument19 pagesAnalisis EspacialVictor David Jaramillo MejíaNo ratings yet
- Intervalos de ConfianzaDocument4 pagesIntervalos de ConfianzaVictor David Jaramillo MejíaNo ratings yet
- 3-Ayuda Muestreo - SergasDocument48 pages3-Ayuda Muestreo - SergasyoveluisNo ratings yet
- Cálculo de MuestraDocument9 pagesCálculo de MuestraluisccorralNo ratings yet
- Agua y Saneamiento - Caso Practico y PlantillaDocument66 pagesAgua y Saneamiento - Caso Practico y Plantillaandrear33100% (1)
- Costumbre Mercantil 4Document21 pagesCostumbre Mercantil 4Victor David Jaramillo MejíaNo ratings yet
- Dialnet CostumbresMercantilesInmobiliariasYFinancieras 3996523Document20 pagesDialnet CostumbresMercantilesInmobiliariasYFinancieras 3996523Victor David Jaramillo MejíaNo ratings yet
- Indigenas y AfrocolombianosDocument165 pagesIndigenas y AfrocolombianosVictor David Jaramillo MejíaNo ratings yet
- Ejercicios t14Document3 pagesEjercicios t14Elisabeth Rojas GallegoNo ratings yet
- Cobertura Con ForwardsDocument7 pagesCobertura Con ForwardsVictor David Jaramillo MejíaNo ratings yet
- ManualBuenasPracticasH PDFDocument95 pagesManualBuenasPracticasH PDFJesus CanenciaNo ratings yet
- Plan de Fortalecimiento de La Competitividad en Mipymes Del Sector Industrial Manufacturero Del Municipio de PastoDocument88 pagesPlan de Fortalecimiento de La Competitividad en Mipymes Del Sector Industrial Manufacturero Del Municipio de PastoVictor David Jaramillo MejíaNo ratings yet
- Indigenas y AfrocolombianosDocument165 pagesIndigenas y AfrocolombianosVictor David Jaramillo MejíaNo ratings yet
- NARIÑO - Plan Regional de Competitividad - 2009Document76 pagesNARIÑO - Plan Regional de Competitividad - 2009Luis CarlosNo ratings yet
- Clima OrganizacionalDocument3 pagesClima OrganizacionalVictor David Jaramillo MejíaNo ratings yet
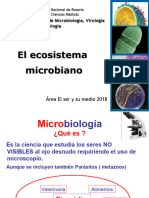
- Microbiologia. Ecosistema MicrobianoDocument92 pagesMicrobiologia. Ecosistema MicrobianoRafaela BugniNo ratings yet
- Quimiorreceptores y MecanorreceptoresDocument10 pagesQuimiorreceptores y MecanorreceptoresLuis Lemus Junior DuqueNo ratings yet
- Tarea No Conformidad - Grupo 3Document3 pagesTarea No Conformidad - Grupo 3Richard CernaNo ratings yet
- Recuento de PlaquetasDocument30 pagesRecuento de PlaquetasJavierNo ratings yet
- Mantenimiento TPDocument5 pagesMantenimiento TPluisd.penasNo ratings yet
- Dani Daortiz Libertad de ExpresionDocument65 pagesDani Daortiz Libertad de ExpresionagalitsaNo ratings yet
- Cedula SatDocument3 pagesCedula Satmartha isabelNo ratings yet
- El Intercambio de Gases en La RespiracionDocument2 pagesEl Intercambio de Gases en La RespiracionDavixito André Gálvez FloresNo ratings yet
- 2-Espacio y Territorio SagradoDocument56 pages2-Espacio y Territorio SagradoMagdalena100% (1)
- BudínDocument3 pagesBudínJavier Rodríguez MéndezNo ratings yet
- Cable Nh80Document2 pagesCable Nh80Jhonnyq3No ratings yet
- Reforzamiento A Cortante Sika CarbodurDocument15 pagesReforzamiento A Cortante Sika CarbodurLuis Gonzales100% (1)
- Reporte Dead Poets SocietyDocument2 pagesReporte Dead Poets SocietySaraNo ratings yet
- AMFE de ProcesoDocument2 pagesAMFE de Procesoluze01133No ratings yet
- Qué Es La Polarimetría y Que Papel Juega en La Caracterización de CarbohidratosDocument2 pagesQué Es La Polarimetría y Que Papel Juega en La Caracterización de CarbohidratosVale HerreraNo ratings yet
- Guía de tablas reposteríaDocument30 pagesGuía de tablas reposteríaValeria Gutierrez100% (2)
- Gloria Fuertes, Poeta de Guardia (Entrevista)Document3 pagesGloria Fuertes, Poeta de Guardia (Entrevista)icanogarNo ratings yet
- Tarea Sem 15 Salazar Flores DenilsonDocument8 pagesTarea Sem 15 Salazar Flores Denilsondenilson.salazarNo ratings yet
- Grado NovenoDocument81 pagesGrado NovenoCarlos Giovany Valencia50% (2)
- Proyecto Integrador - Plagas Del CaféDocument44 pagesProyecto Integrador - Plagas Del CaféAlberto DíazNo ratings yet
- Cige ProverificaDocument5 pagesCige ProverificaDiego PicazoNo ratings yet
- Superficies RefractorasDocument12 pagesSuperficies RefractorasalvarodejNo ratings yet
- Temario BiologíaDocument2 pagesTemario BiologíaSaid RodríguezNo ratings yet
- Trabajo ParasitologiaDocument9 pagesTrabajo ParasitologiaMiguel NavarroNo ratings yet
- Habilidades, Actitudes, Objetivos y Metas de Los Grupo de TrabajoDocument6 pagesHabilidades, Actitudes, Objetivos y Metas de Los Grupo de TrabajoDaniela Kamikaze SakuraiNo ratings yet
- 2018 AwsDocument1 page2018 AwsDiego EliasNo ratings yet
- TemasDocument20 pagesTemasMaería Aroca BustosNo ratings yet
- Tarea 2Document8 pagesTarea 2Miguel Angel Rodriguez CervantesNo ratings yet
- Manuales - Acceso A DatosDocument3 pagesManuales - Acceso A Datosedson_uribioNo ratings yet