You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tornado probe photos quizDocument2 pagesTornado probe photos quizandredasanfonaNo ratings yet
- Stochastic Modelling 2000-2004Document189 pagesStochastic Modelling 2000-2004Brian KufahakutizwiNo ratings yet
- MoES Technology Vision for Ocean ExplorationDocument289 pagesMoES Technology Vision for Ocean ExplorationPrabhat KumarNo ratings yet
- Maths ProjectDocument21 pagesMaths Projectdivya0% (1)
- Test BankDocument4 pagesTest Bankashish_20kNo ratings yet
- Responsible Investment - A Guide For Private Equity Venture CapitalDocument16 pagesResponsible Investment - A Guide For Private Equity Venture Capitalashish_20kNo ratings yet
- Key Financial Ratios for Liquidity, Solvency, Profitability and ActivityDocument2 pagesKey Financial Ratios for Liquidity, Solvency, Profitability and Activityashish_20kNo ratings yet
- AccentureDocument13 pagesAccentureashish_20kNo ratings yet
- River Sand Costing As On 1/2/2006Document1 pageRiver Sand Costing As On 1/2/2006ashish_20kNo ratings yet
- Mission Begin AgainDocument4 pagesMission Begin Againashish_20kNo ratings yet
- Cement Survey - Retail MarketDocument6 pagesCement Survey - Retail Marketashish_20kNo ratings yet
- Oil ReportDocument8 pagesOil Reportashish_20kNo ratings yet
- HSK (Hanyu Shuiping Kaoshi) - DeMODocument8 pagesHSK (Hanyu Shuiping Kaoshi) - DeMOashish_20kNo ratings yet
- Cement Survey 2 - Retail MarketDocument5 pagesCement Survey 2 - Retail Marketashish_20kNo ratings yet
- Damodaran DCFDocument15 pagesDamodaran DCFpraveen_356100% (2)
- Refineries in India: S. No. Name o The Company F Location o The F Refinery Capacity, MmtpaDocument22 pagesRefineries in India: S. No. Name o The Company F Location o The F Refinery Capacity, MmtpaAmrit SarkarNo ratings yet
- Sustainability 1050861Document22 pagesSustainability 1050861AceNo ratings yet
- CSCP Ls 2018 Brochure 8.5x11Document8 pagesCSCP Ls 2018 Brochure 8.5x11GangadharNo ratings yet
- ItIsYrBusiness PDFDocument12 pagesItIsYrBusiness PDFashish_20kNo ratings yet
- Lavasa Investor WoesDocument1 pageLavasa Investor Woesashish_20kNo ratings yet
- Reforms NeededDocument5 pagesReforms Neededashish_20kNo ratings yet
- Municipal BondDocument5 pagesMunicipal Bondashish_20kNo ratings yet
- NMIMS 2012 Holiday ListDocument2 pagesNMIMS 2012 Holiday Listashish_20kNo ratings yet
- BopDocument12 pagesBopashish_20kNo ratings yet
- Futures PrikcesDocument51 pagesFutures PrikcesLuis MiguelNo ratings yet
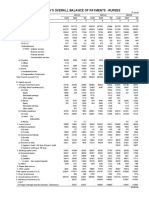
- Table 141: India'S Overall Balance of Payments - RupeesDocument3 pagesTable 141: India'S Overall Balance of Payments - Rupeesashish_20kNo ratings yet
- Working CapitalDocument55 pagesWorking Capitalashish_20kNo ratings yet
- Take Over Code 2011 PDFDocument64 pagesTake Over Code 2011 PDFashish_20kNo ratings yet
- Astm A105 PDFDocument5 pagesAstm A105 PDFrodriguez.gaytan100% (1)
- Chapter 14Document46 pagesChapter 14ashish_20k0% (1)
- Chapter 25Document35 pagesChapter 25Muhammad Zahid FaridNo ratings yet
- Press and To Open Baan Report: Alt-F8 EnterDocument1 pagePress and To Open Baan Report: Alt-F8 Enterashish_20kNo ratings yet
- Wrap Text SampleDocument2 pagesWrap Text Sampleashish_20kNo ratings yet
- 1.check ListDocument2 pages1.check Listashish_20kNo ratings yet
- Lemonade Stall Version 1 - 4Document19 pagesLemonade Stall Version 1 - 4Alan LibertNo ratings yet
- Brochure NCSS 2000 PDFDocument16 pagesBrochure NCSS 2000 PDFgore_11No ratings yet
- S OP Mind Map 1568467991Document1 pageS OP Mind Map 1568467991MehmetNo ratings yet
- Our Iceberg Is Melting PresentationDocument25 pagesOur Iceberg Is Melting PresentationHesham Fadly100% (1)
- Weather: What Is Wind?Document8 pagesWeather: What Is Wind?ruvinNo ratings yet
- Demand Forecasting SlidesDocument62 pagesDemand Forecasting SlidesSiddharth Narayanan ChidambareswaranNo ratings yet
- MMAPreferred Catalog 2010Document12 pagesMMAPreferred Catalog 2010Deep MandaliaNo ratings yet
- DR P Bamforth - Durability Study of A Diaphragm Wall - CONCRETE CRACKING JLDocument27 pagesDR P Bamforth - Durability Study of A Diaphragm Wall - CONCRETE CRACKING JLembaagil100% (1)
- Introduction To Food Freezing - 3Document50 pagesIntroduction To Food Freezing - 3Mahesh KumarNo ratings yet
- Mathematics For OrganizationDocument5 pagesMathematics For OrganizationFrancepogi4ever YTNo ratings yet
- Opinion Column WorksheetDocument3 pagesOpinion Column WorksheetAstridNo ratings yet
- Verbs IrregularDocument7 pagesVerbs IrregularIsabel Ferreira0% (1)
- Statistical MethodsDocument16 pagesStatistical MethodsyasheshgaglaniNo ratings yet
- The Flatmates: Language Point: Weather VocabularyDocument3 pagesThe Flatmates: Language Point: Weather VocabularyCristian SavaNo ratings yet
- SPE 39931 (1998) Production Analysis of Linear Flow Into Fractured Tight Gas WellsDocument12 pagesSPE 39931 (1998) Production Analysis of Linear Flow Into Fractured Tight Gas WellsEric RodriguesNo ratings yet
- Correlation Between The Wind Speed and The Elevation To Evaluate The Wind Potential in The Southern Region of EcuadorDocument17 pagesCorrelation Between The Wind Speed and The Elevation To Evaluate The Wind Potential in The Southern Region of EcuadorHolguer TisalemaNo ratings yet
- Innocent Life HahaDocument243 pagesInnocent Life HahaRyzameil Andrea UyNo ratings yet
- Guidelines For The Education and Training of Personnel in Meteorology and Operational HydrologyDocument61 pagesGuidelines For The Education and Training of Personnel in Meteorology and Operational HydrologyRucelle Chiong GarcianoNo ratings yet
- Futurology in PerspectiveDocument10 pagesFuturology in Perspectivefx5588No ratings yet
- StatPad Installation and User GuideDocument85 pagesStatPad Installation and User GuideBhargav Singirikonda0% (1)
- Future Tense ExercisesDocument3 pagesFuture Tense ExercisesThanhThaoTruongNo ratings yet
- Truth About Range DataDocument13 pagesTruth About Range DataGilley EstesNo ratings yet
- JRC Spaceweather Awareness DialogueDocument27 pagesJRC Spaceweather Awareness Dialoguembarraza727No ratings yet
- c1 - Additional Practice QuestionsDocument15 pagesc1 - Additional Practice Questionsapi-261193362No ratings yet
- Learn About Weather and SeasonsDocument10 pagesLearn About Weather and SeasonsMita Isnaini HarahapNo ratings yet
- ForecastingDocument2 pagesForecastingRaymart FloresNo ratings yet