You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Power System AnalysisDocument5 pagesPower System AnalysisVidyavihar ReddyNo ratings yet
- Fault analysis and sequence networks of power systemsDocument7 pagesFault analysis and sequence networks of power systemsDenish Gupta0% (1)
- Regulatory Compliance and Generator ControlDocument59 pagesRegulatory Compliance and Generator ControlsulemankhalidNo ratings yet
- Power System Operation and ControlDocument28 pagesPower System Operation and ControlDebasish ChoudhuryNo ratings yet
- Power System Analysis 2 MarksDocument35 pagesPower System Analysis 2 MarksSyama ShankarNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysisHendra Dwi RamadhanNo ratings yet
- Reactive Power ControlDocument25 pagesReactive Power ControlDeepti GuptaNo ratings yet
- Economic Operation of Power SystemsDocument45 pagesEconomic Operation of Power SystemsDogbey BrightNo ratings yet
- UNSW - ELECTRICAL ENGINEERING AND TELECOMMUNICATIONS POWER SYSTEM ANALYSIS LABDocument4 pagesUNSW - ELECTRICAL ENGINEERING AND TELECOMMUNICATIONS POWER SYSTEM ANALYSIS LABDavid VangNo ratings yet
- Studying No-Load Operation of Transmission LineDocument44 pagesStudying No-Load Operation of Transmission Lineeaf1No ratings yet
- EE2401 Power System Operation and ControlDocument93 pagesEE2401 Power System Operation and ControlPrasanth GovindarajNo ratings yet
- Computer Aided Power System AnalysisDocument323 pagesComputer Aided Power System AnalysisCaribNo ratings yet
- MatLAB SimPowerSystems for Modelling and SimulationDocument10 pagesMatLAB SimPowerSystems for Modelling and SimulationSemih Cem İlikNo ratings yet
- Power Control AGC1Document35 pagesPower Control AGC1surya892100% (1)
- Power System Analysis Syallbus MG Univ KeralaDocument1 pagePower System Analysis Syallbus MG Univ KeralaChristy CyriacNo ratings yet
- Fault AnalysisDocument29 pagesFault AnalysisWaqar Ahmed0% (1)
- Power System Analysis in GridDocument25 pagesPower System Analysis in GridMamta Mrjn100% (1)
- Advanced Power System Analysis r13Document1 pageAdvanced Power System Analysis r13aleem_201sNo ratings yet
- Power System Operation and ControlDocument14 pagesPower System Operation and ControlNumber But100% (1)
- Power Flow: EE 150 Power System Analysis 2Document21 pagesPower Flow: EE 150 Power System Analysis 2Jay Sunga VillanNo ratings yet
- Short-Circuit Current CalculationDocument38 pagesShort-Circuit Current CalculationElectro Tractrix100% (1)
- ECE 261 Power Flow Analysis StepsDocument6 pagesECE 261 Power Flow Analysis StepsMiluu86No ratings yet
- Power System AnalysisDocument4 pagesPower System AnalysisnnkhanhvanNo ratings yet
- EE 1352 POWER SYSTEM ANALYSIS Q&ADocument7 pagesEE 1352 POWER SYSTEM ANALYSIS Q&ASandhosh RajaNo ratings yet
- Power System Analysis: Optimal Power Flow, Lmps Tom Overbye and Ross BaldickDocument26 pagesPower System Analysis: Optimal Power Flow, Lmps Tom Overbye and Ross BaldickAbdulyunus AmirNo ratings yet
- II - PowerPoint Slides To Chapter 01 IntroductionDocument17 pagesII - PowerPoint Slides To Chapter 01 IntroductionVishesh Dhillon100% (2)
- Power FlowDocument33 pagesPower FlowbaboyasoNo ratings yet
- Monitoring and Control of Power SystemsDocument18 pagesMonitoring and Control of Power Systemsvishal100% (1)
- EE61 Power System AnalysisDocument3 pagesEE61 Power System AnalysisMartin De Boras PragashNo ratings yet
- 3.6-PSOC Optimized PDFDocument68 pages3.6-PSOC Optimized PDFN R SHEKARNo ratings yet
- Power Flow Algorithm IntroductionDocument17 pagesPower Flow Algorithm IntroductionRohit VermaNo ratings yet
- Power System Protection Presentation Dated 03-10-2013 Integrated Protection ControlDocument89 pagesPower System Protection Presentation Dated 03-10-2013 Integrated Protection ControlNagarajan GanesanNo ratings yet
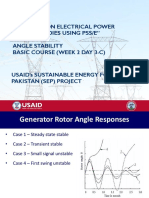
- W-2-Day-3-C - Angle StabilityDocument17 pagesW-2-Day-3-C - Angle StabilityKASHIFNo ratings yet
- Power System AnalysisDocument1 pagePower System AnalysisEm Ali KhanNo ratings yet
- Power System Reliability, Security and State Estimation NotesDocument14 pagesPower System Reliability, Security and State Estimation NotespriyaNo ratings yet
- Newton Raphson MethodDocument30 pagesNewton Raphson MethodDinesh Kumar100% (1)
- Power Flow AnalysisDocument140 pagesPower Flow Analysisdbharanidharan3334100% (1)
- Saraswathi Velu College of Engineering Power System AnalysisDocument59 pagesSaraswathi Velu College of Engineering Power System Analysissaran_0666100% (1)
- Power System Security: Viren B. PandyaDocument23 pagesPower System Security: Viren B. PandyavirenpandyaNo ratings yet
- VISUALIZING POWER SYSTEM DYNAMICSDocument11 pagesVISUALIZING POWER SYSTEM DYNAMICSAlejandro Echeverry FernandezNo ratings yet
- Power System Protection AssignmentDocument26 pagesPower System Protection AssignmentMohsin AhsanNo ratings yet
- Understanding Off Nominal Tap RatioDocument9 pagesUnderstanding Off Nominal Tap RatioShyamkant VasekarNo ratings yet
- Power FlowDocument30 pagesPower FlowDresta Ari ArkanNo ratings yet
- Load Shedding Using Voltage and FrequencyDocument97 pagesLoad Shedding Using Voltage and FrequencySe SamnangNo ratings yet
- Introduction to Power System Operation and Control Using ARISTODocument31 pagesIntroduction to Power System Operation and Control Using ARISTOvivekanandaNo ratings yet
- Lab 6 Symmetrical Short Circuit Analysis in Power World SimulatorDocument11 pagesLab 6 Symmetrical Short Circuit Analysis in Power World SimulatorHumayun KakarNo ratings yet
- Voltage ControlDocument25 pagesVoltage Controlbenson215100% (1)
- Converter Faults & ProtectionDocument24 pagesConverter Faults & ProtectionrakeshNo ratings yet
- Power System Operation and Control NotesDocument61 pagesPower System Operation and Control Notesanon_613151744100% (1)
- TEEE 4203 Fault Analysis Lecture 2a Symmetrical FaultsDocument54 pagesTEEE 4203 Fault Analysis Lecture 2a Symmetrical Faultswakolesha Tadeo100% (2)
- Power Flow AnalysisDocument11 pagesPower Flow AnalysisPradeep RajasekeranNo ratings yet
- PSCAD Fault Level Calculations Lab ReportDocument13 pagesPSCAD Fault Level Calculations Lab ReportdivanteNo ratings yet
- Unsymmetrical Fault AnalysisDocument15 pagesUnsymmetrical Fault Analysiszeemred085100% (1)
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocument5 pagesImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNo ratings yet
- Module 1, PSPRDocument11 pagesModule 1, PSPRGYANA RANJANNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Fuzzy Logic Based Photovoltaic Peak Power Tracking ControllerDocument46 pagesFuzzy Logic Based Photovoltaic Peak Power Tracking ControllerAlexandra Moinhos100% (1)
- APEGGAPowerSystems PDFDocument60 pagesAPEGGAPowerSystems PDFHassan ShiraziNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- EEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsDocument5 pagesEEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsIJSTENo ratings yet
- Strategic Marketing Plan For Red Bull - Elvis Asiedu - Academia - Edu PDFDocument23 pagesStrategic Marketing Plan For Red Bull - Elvis Asiedu - Academia - Edu PDFThomas Diwo0% (1)
- Activities For Responding To Reading in Year 2Document59 pagesActivities For Responding To Reading in Year 2lancashireliteracy100% (1)
- Yoshimi Advanced User ManualDocument297 pagesYoshimi Advanced User Manualfby999No ratings yet
- Us00-000 831 01 02 02Document18 pagesUs00-000 831 01 02 02Cristian Camilo0% (1)
- Organizational Development and EvaluationDocument22 pagesOrganizational Development and EvaluationFransisca RosalinNo ratings yet
- (Acta Universitatis Gothoburgensis) Tryggve Göransson - Albinus, Alcinous, Arius Didymus (1995) PDFDocument128 pages(Acta Universitatis Gothoburgensis) Tryggve Göransson - Albinus, Alcinous, Arius Didymus (1995) PDFMarcos EstevamNo ratings yet
- Rom, Eprom, & Eeprom Technology: Figure 9-1. Read Only Memory SchematicDocument14 pagesRom, Eprom, & Eeprom Technology: Figure 9-1. Read Only Memory SchematicVu LeNo ratings yet
- Nursing ProcessDocument88 pagesNursing ProcessGerard On LineNo ratings yet
- Cascadable Broadband Gaas Mmic Amplifier DC To 10Ghz: FeaturesDocument9 pagesCascadable Broadband Gaas Mmic Amplifier DC To 10Ghz: Featuresfarlocco23No ratings yet
- Ravindar ReddyDocument4 pagesRavindar ReddysaanaprasadNo ratings yet
- FlowTradersSOP PDFDocument1 pageFlowTradersSOP PDFAvinash IyerNo ratings yet
- POOJA TRADING CO. Price List for FRP Manhole CoversDocument1 pagePOOJA TRADING CO. Price List for FRP Manhole Coversmitesh20281No ratings yet
- Object-Oriented Programming (OOP) Lecture No. 5Document40 pagesObject-Oriented Programming (OOP) Lecture No. 5Muhammad ZeeshanNo ratings yet
- Fta-500 A (03-20-08) PDFDocument8 pagesFta-500 A (03-20-08) PDFOrlando Vazquez PuertaNo ratings yet
- Aadhaar is proof of identity, not citizenshipDocument1 pageAadhaar is proof of identity, not citizenshipPARTAPNo ratings yet
- Magazine 55 EnglishPartDocument50 pagesMagazine 55 EnglishPartAli AwamiNo ratings yet
- SOLID-LIQUID EXTRACTIONDocument4 pagesSOLID-LIQUID EXTRACTIONHarshal Agrawal100% (1)
- Plagiarized Bio-Nanoelectronics in "Journal of The American Chemical Society"Document7 pagesPlagiarized Bio-Nanoelectronics in "Journal of The American Chemical Society"Rostyslav SKLYAR, Dr. (Eng)No ratings yet
- Phil of DepressDocument11 pagesPhil of DepressPriyo DjatmikoNo ratings yet
- Thandeka, Learning To Be White: Money, Race, and God in America (New York: Continuum International Publishing Group, 1999), 169 PPDocument2 pagesThandeka, Learning To Be White: Money, Race, and God in America (New York: Continuum International Publishing Group, 1999), 169 PPFefa LinsNo ratings yet
- Fire Risk Assessment FormDocument16 pagesFire Risk Assessment Formmukamat safiiNo ratings yet
- ResumeDocument4 pagesResumeBazlaa HasmanNo ratings yet
- Generate power from solar roof tilesDocument4 pagesGenerate power from solar roof tilesshalinthNo ratings yet
- Mastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesDocument48 pagesMastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesSaul Saldana LoyaNo ratings yet
- Regulation of AlternatorDocument6 pagesRegulation of Alternatorkudupudinagesh100% (1)
- Assignment (40%) : A) Formulate The Problem As LPM B) Solve The LPM Using Simplex AlgorithmDocument5 pagesAssignment (40%) : A) Formulate The Problem As LPM B) Solve The LPM Using Simplex Algorithmet100% (1)
- Trip WireDocument19 pagesTrip Wirepinky065558100% (2)
- Kent Lawrence LORDAN Grade-1Document1 pageKent Lawrence LORDAN Grade-1Kent Lawrence LordanNo ratings yet
- Managing Change Leading TransitionsDocument42 pagesManaging Change Leading TransitionsSecrets26No ratings yet