You might also like
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroRana UsmanNo ratings yet
- Lec 2 Robot ManipulatorsDocument14 pagesLec 2 Robot ManipulatorsAjanthan AlagaratnamNo ratings yet
- Industrial Robotics: Anatomy, Control, Sensing and ApplicationsDocument74 pagesIndustrial Robotics: Anatomy, Control, Sensing and ApplicationsMURALIGOCAM_29070605No ratings yet
- Robotics Toolbox For MATLAB Rel6Document6 pagesRobotics Toolbox For MATLAB Rel6Eduardo RodríguezNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- Robot Kinematics GuideDocument52 pagesRobot Kinematics GuidedanvicNo ratings yet
- 021.kinematics Inverse Kinematics ManipulationDocument107 pages021.kinematics Inverse Kinematics ManipulationGanesh MandpeNo ratings yet
- Chapter 5 (Trajectory Planning)Document24 pagesChapter 5 (Trajectory Planning)Saurabh ThakurNo ratings yet
- Robotics - Inverse KinematicsDocument49 pagesRobotics - Inverse KinematicsRiyomi SeizaNo ratings yet
- Inverse Kinematics Solution For 6 Degree of Freedom of Fanuc LR Mate 200IB Robot - Mohd Khafizuddin Khairddin - TJ211.412.M54 2010 24 PagesDocument24 pagesInverse Kinematics Solution For 6 Degree of Freedom of Fanuc LR Mate 200IB Robot - Mohd Khafizuddin Khairddin - TJ211.412.M54 2010 24 Pagesluis0% (3)
- Chapter 2 SolutionDocument4 pagesChapter 2 SolutionEngr ShabirNo ratings yet
- Robotics Kinematics and DynamicsDocument24 pagesRobotics Kinematics and Dynamicsأحمد دعبسNo ratings yet
- Robot Kinematics OverviewDocument45 pagesRobot Kinematics OverviewkwastekNo ratings yet
- Experiment - 05: FIG1: 2 Prismatic Joint Manipulator FIG 2: 2 Prismatic Joint ManipulatorDocument8 pagesExperiment - 05: FIG1: 2 Prismatic Joint Manipulator FIG 2: 2 Prismatic Joint ManipulatorManthan SinghNo ratings yet
- Sudharsan Engineering College: UNIT I Fundamentals of RobotsDocument7 pagesSudharsan Engineering College: UNIT I Fundamentals of RobotsmetkarthikNo ratings yet
- ME 2028 ROBOTICS-Questionbank Unit1&2Document2 pagesME 2028 ROBOTICS-Questionbank Unit1&2Karthick RamNo ratings yet
- Manipulator KinematicsDocument42 pagesManipulator KinematicsKarthikeyanRamanujamNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterNo ratings yet
- NXT SCARA Model-Based DesignDocument65 pagesNXT SCARA Model-Based DesignEdgar BanuelosNo ratings yet
- Experiment - 5: AIM-To Study Forward KinematicsDocument7 pagesExperiment - 5: AIM-To Study Forward Kinematicsvarunmonga90No ratings yet
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- Forward and Inverse Kinematics of A 6DOF RobotDocument14 pagesForward and Inverse Kinematics of A 6DOF RobotUchenna Ezeobi100% (2)
- Manipulator KinematicsDocument24 pagesManipulator KinematicsQueron Williams100% (2)
- MEM201 L6-Tolerance RCDocument82 pagesMEM201 L6-Tolerance RCNizar Pratama PutraNo ratings yet
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523No ratings yet
- Robotics Programming and ApplicationsDocument38 pagesRobotics Programming and ApplicationsShanti Lal MeenaNo ratings yet
- Robot Assist Users Manual PDFDocument80 pagesRobot Assist Users Manual PDFIvan AvramovNo ratings yet
- Robot Manual Peter CorkeDocument101 pagesRobot Manual Peter Corkeingenioso23No ratings yet
- 6 Robot Kinematics and Dynamics 1 PDFDocument45 pages6 Robot Kinematics and Dynamics 1 PDFCosorAndrei-AlexandruNo ratings yet
- Robotics Unit-5 Question BankDocument6 pagesRobotics Unit-5 Question BankveerapandianNo ratings yet
- Inverse kinematics algorithm for 5-DOF robot armDocument13 pagesInverse kinematics algorithm for 5-DOF robot armsathyaNo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- Point To Point ControlDocument19 pagesPoint To Point ControlrajeshNo ratings yet
- Vision Guided Robotics Maximizes Flexibility, Quality and Cost SavingsDocument24 pagesVision Guided Robotics Maximizes Flexibility, Quality and Cost SavingsPedro SolNo ratings yet
- Understanding Manual and Automatic Operations of Industrial RobotsDocument35 pagesUnderstanding Manual and Automatic Operations of Industrial RobotsWafiNo ratings yet
- Robot KinematicsDocument84 pagesRobot KinematicsElumalai BoominathanNo ratings yet
- Matlab by Rajesh Bandari YadavDocument55 pagesMatlab by Rajesh Bandari Yadavhyma kadakatla100% (2)
- Simulation of Robotic ManipulatorsDocument6 pagesSimulation of Robotic ManipulatorstaydomanNo ratings yet
- Robotic ArmDocument6 pagesRobotic ArmKunall KohliNo ratings yet
- Inverse Kinematic Control of A Prosthetic ArmDocument26 pagesInverse Kinematic Control of A Prosthetic Armodsnet100% (1)
- Basic RobotsDocument28 pagesBasic Robotsrammit2007No ratings yet
- Chapter 3 - CPU ArchitectureDocument62 pagesChapter 3 - CPU Architecturesanthosh pavan kumarNo ratings yet
- RobotDocument93 pagesRobotgeniusmexicanNo ratings yet
- STS121 M3L3 - Automation and RoboticsDocument8 pagesSTS121 M3L3 - Automation and RoboticsJusteene SaysonNo ratings yet
- Robtics, 2007Document358 pagesRobtics, 2007Arnel Pascual LaquindanumNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroG30nyNo ratings yet
- Kinematics of Robots: Alba Perez GraciaDocument15 pagesKinematics of Robots: Alba Perez GraciaLin JiangNo ratings yet
- Flight Direction Cosine MatrixDocument11 pagesFlight Direction Cosine MatrixsazradNo ratings yet
- Chapter 5 Forward and Inverse KinematicsDocument10 pagesChapter 5 Forward and Inverse KinematicsAkram AlsadeqNo ratings yet
- FK Positioning Chapter Explains Robot JointsDocument23 pagesFK Positioning Chapter Explains Robot Jointsأحمد دعبسNo ratings yet
- Chapter 2 - Robot KinematicsDocument35 pagesChapter 2 - Robot KinematicsShitnu SuwanNo ratings yet
- Ma 2000 PDFDocument18 pagesMa 2000 PDFMuhammad ZulfiqarNo ratings yet
- Joints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFDocument33 pagesJoints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFf0245652No ratings yet
- MODEL QP RoboticsDocument5 pagesMODEL QP RoboticssivaeeinfoNo ratings yet
- UNIT-IVDocument5 pagesUNIT-IVtarasasankaNo ratings yet
- Direct and Inverse Kinematics ExplainedDocument25 pagesDirect and Inverse Kinematics ExplainedMyagmarbayar NerguiNo ratings yet
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- Follower AssemblyDocument1 pageFollower AssemblyRakeshSainiNo ratings yet
- Cam AssemblyDocument1 pageCam AssemblyRakeshSainiNo ratings yet
- Engineering Drawing Lab ManualDocument52 pagesEngineering Drawing Lab ManualRakeshSaini83% (6)
- Assignment 1: Sbuject: MCTD Last Date: 7/11/2016Document1 pageAssignment 1: Sbuject: MCTD Last Date: 7/11/2016RakeshSainiNo ratings yet
- Ultrasonic Machining (USM)Document19 pagesUltrasonic Machining (USM)RakeshSaini100% (2)
- Cam Assignment 1Document2 pagesCam Assignment 1RakeshSainiNo ratings yet
- Robot DynamicsDocument15 pagesRobot DynamicsRakeshSaini100% (1)
- Optimization Desgin StudyDocument1 pageOptimization Desgin StudyRakeshSainiNo ratings yet
- MCTD TutorialDocument5 pagesMCTD TutorialRakeshSainiNo ratings yet
- Fundamentals of RoboticsDocument26 pagesFundamentals of RoboticsRakeshSainiNo ratings yet
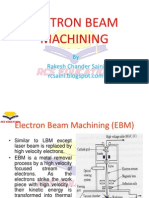
- Electron Beam Machining (EBM)Document8 pagesElectron Beam Machining (EBM)RakeshSaini100% (3)
- Definition of StressDocument14 pagesDefinition of StressRakeshSainiNo ratings yet
- ProE Lab Work 1 To 11Document11 pagesProE Lab Work 1 To 11RakeshSainiNo ratings yet
- Flexible Manufacturing Systems (FMS)Document40 pagesFlexible Manufacturing Systems (FMS)RakeshSaini100% (4)
- Robot End EffectorDocument25 pagesRobot End EffectorRakeshSainiNo ratings yet
- Indian AutomobileDocument35 pagesIndian AutomobileRakeshSainiNo ratings yet
- Cellular Manufacturing SystemDocument34 pagesCellular Manufacturing SystemRakeshSainiNo ratings yet
- Digital ManufacturingDocument33 pagesDigital ManufacturingRakeshSaini100% (1)
- CNCDocument43 pagesCNCRakeshSainiNo ratings yet
- Personnel ManagementDocument10 pagesPersonnel ManagementRakeshSainiNo ratings yet
- Assembly Line BalancingDocument26 pagesAssembly Line BalancingRakeshSaini100% (4)
- Nontraditional Manufacturing ProcessDocument57 pagesNontraditional Manufacturing ProcessRakeshSainiNo ratings yet
- Computer Aided ManufacturingDocument72 pagesComputer Aided ManufacturingRakeshSaini100% (1)
- Introdution CAD/CAMDocument27 pagesIntrodution CAD/CAMRakeshSainiNo ratings yet
- SHEET METAL PROCESSING-Traditional Manufacturing ProcessesDocument14 pagesSHEET METAL PROCESSING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- FORMING-Traditional Manufacturing ProcessesDocument38 pagesFORMING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- CASTING-Traditional Manufacturing ProcessesDocument51 pagesCASTING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Traction Control SystemDocument24 pagesTraction Control SystemRakeshSaini100% (1)
- Handbook On Curves PDFDocument129 pagesHandbook On Curves PDFAnonymous 4nfpg1x3qNo ratings yet
- Chapter 2 - Part 4: Dot Product: Today's ObjectiveDocument14 pagesChapter 2 - Part 4: Dot Product: Today's ObjectiveKarl KronosNo ratings yet
- JEE Advanced Rank Enhancer Batch Math Day 02 Questions MathongoDocument10 pagesJEE Advanced Rank Enhancer Batch Math Day 02 Questions MathongoAsif HodaNo ratings yet
- ANalytic GeometryDocument112 pagesANalytic Geometryanon ggNo ratings yet
- A. Long ChordDocument10 pagesA. Long ChordHarvey PagaranNo ratings yet
- Intersecting CylindersDocument4 pagesIntersecting CylinderstyuNo ratings yet
- 373 07 2Document143 pages373 07 2fpttmmNo ratings yet
- Integral TableDocument2 pagesIntegral TableJuan Carlos De Los Santos SantosNo ratings yet
- Guideswp Contentuploads20180829100056Three Dimensional Geometry PDFDocument3 pagesGuideswp Contentuploads20180829100056Three Dimensional Geometry PDFyogirajgolu242484No ratings yet
- Sample Problems (PART 1)Document7 pagesSample Problems (PART 1)Mark Carlo BautistaNo ratings yet
- CS335 Computer Graphics: Circle and Ellipse Drawing AlgorithmsDocument37 pagesCS335 Computer Graphics: Circle and Ellipse Drawing AlgorithmsDeepika AgrawalNo ratings yet
- RoboticsDocument5 pagesRoboticsCyrilNo ratings yet
- Inverse Trigonometric Functions PDFDocument10 pagesInverse Trigonometric Functions PDFJiung WeiNo ratings yet
- Pre-Calculus: Jean B. Corpuz, LPT InstructorDocument31 pagesPre-Calculus: Jean B. Corpuz, LPT InstructorJean CorpuzNo ratings yet
- Tensor Operators and Their ApplicationsDocument200 pagesTensor Operators and Their ApplicationsrustomhabtaiNo ratings yet
- Hexapod KinematicsDocument5 pagesHexapod KinematicsYahyaNo ratings yet
- ME 6201 Applied Elasticity and Plasticity Stress Functions in Polar CoordinatesDocument32 pagesME 6201 Applied Elasticity and Plasticity Stress Functions in Polar CoordinatesPrabhataNo ratings yet
- 06 CH.6 Conic SectionsDocument21 pages06 CH.6 Conic SectionsAfrazia UmerNo ratings yet
- Laplace TableDocument2 pagesLaplace TableNadeem RehmanNo ratings yet
- Ma2111 ImpartantDocument13 pagesMa2111 ImpartantPrem KumarNo ratings yet
- SCQ Questions on Conic SectionsDocument21 pagesSCQ Questions on Conic SectionsAbhiNo ratings yet
- Physics: Dedicated To Dmitry Borisovich Fuchs On His 50th BirthdayDocument30 pagesPhysics: Dedicated To Dmitry Borisovich Fuchs On His 50th BirthdayfasdfasdfNo ratings yet
- Understanding Stereonets and Plotting Planes & LinesDocument19 pagesUnderstanding Stereonets and Plotting Planes & LinesSEDIMNo ratings yet
- History of Conic SectionsDocument10 pagesHistory of Conic SectionsJunna Mae GimongalaNo ratings yet
- More Problems On Conic SectionsDocument8 pagesMore Problems On Conic SectionsAzeNo ratings yet
- Curves and Elements GuideDocument34 pagesCurves and Elements GuideRommel de MesaNo ratings yet
- CALCULUS Module Final 4Document18 pagesCALCULUS Module Final 4PENDON, JORELLENo ratings yet
- 18.112 PSet5 SolutionsDocument4 pages18.112 PSet5 SolutionsHem Narayan Das ChaudharyNo ratings yet
- Complementary Error Function Table: X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X)Document1 pageComplementary Error Function Table: X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X)Yadu KrishnanNo ratings yet
- Circles and conic sections review problemsDocument9 pagesCircles and conic sections review problemsMaze GomezNo ratings yet