You might also like
- 5 - Charm - Tracy Wolff (Google Trasnlate)Document1,010 pages5 - Charm - Tracy Wolff (Google Trasnlate)L O L A43% (7)
- Guía de cableado estructuradoDocument20 pagesGuía de cableado estructuradoBrayam Stiven Figueroa Ramirez100% (1)
- Motores 4 Cilindros 1,6l 2,0l TDI de La Serie EA288Document48 pagesMotores 4 Cilindros 1,6l 2,0l TDI de La Serie EA288Jose Miguel Mencias Mancebo100% (1)
- El Arte Como Territorio de ResistenciaDocument183 pagesEl Arte Como Territorio de ResistenciacawabaNo ratings yet
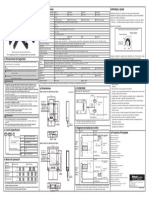
- Autonics Bup Esp ManualDocument1 pageAutonics Bup Esp ManualfchumpitazNo ratings yet
- Ecografia Recomendaciones. Nov 2020 - CompressedDocument30 pagesEcografia Recomendaciones. Nov 2020 - CompressedyuyoeightNo ratings yet
- DownloadDocument3 pagesDownloadma jsisNo ratings yet
- Functional Programming With Elixir EsDocument29 pagesFunctional Programming With Elixir Eselkinlon0930No ratings yet
- Poemas CortosDocument24 pagesPoemas CortosArmand MartinezNo ratings yet
- SEO060209C93 SAi 00093355 ASO141209F25Document1 pageSEO060209C93 SAi 00093355 ASO141209F25Ashley Elizabeth Urías IribeNo ratings yet
- Universidad de Costa Rica EspecialidadesDocument29 pagesUniversidad de Costa Rica EspecialidadesElishua JotamNo ratings yet
- PraziquantelDocument3 pagesPraziquantelJimena HuayllaniNo ratings yet
- Tarea 3 de Psicologia EducativaDocument4 pagesTarea 3 de Psicologia EducativaclaritzaNo ratings yet
- Plan Till AsDocument19 pagesPlan Till AsMara MarcaNo ratings yet
- Iumar 2023Document3 pagesIumar 2023fernando guillen telloNo ratings yet
- Laboratorio Con TelnetDocument5 pagesLaboratorio Con TelnetPorfin AlguienNo ratings yet
- Ev. 2 - Eq. 7 - Procesos de CalidadDocument12 pagesEv. 2 - Eq. 7 - Procesos de Calidadandrea reyesNo ratings yet
- Entendimiento de RetailDocument56 pagesEntendimiento de RetailMarcela RomanNo ratings yet
- Wuolah Free Tema 4 Servicio AISDocument13 pagesWuolah Free Tema 4 Servicio AISElpana cosmicoNo ratings yet
- RC02R10 SaludDocument26 pagesRC02R10 SaludRodrigo CondorettyNo ratings yet
- Compra de Verduras 11.03.2023Document2 pagesCompra de Verduras 11.03.2023cintiaNo ratings yet
- Descontinuacion de ModelosDocument2 pagesDescontinuacion de ModelosBeto FmJrNo ratings yet
- Tríptico Cocina V2Document2 pagesTríptico Cocina V2Elena ramosNo ratings yet
- Falla CochabambaDocument6 pagesFalla CochabambahugogalindoNo ratings yet
- Examen Cálculo - VectorialDocument2 pagesExamen Cálculo - Vectorialvictacito100% (1)
- Características, monitoreo y evaluación del H2SDocument18 pagesCaracterísticas, monitoreo y evaluación del H2SCesar Samuel Justil OlivaresNo ratings yet
- GRUPO 1 - La Evolución Digital en El Sistema Financiero PeruanoDocument16 pagesGRUPO 1 - La Evolución Digital en El Sistema Financiero PeruanoFelipe Soplopuco RivadeneiraNo ratings yet
- 7 Libros Recomendados para Costos y Presupuestos - CivilGeeksDocument9 pages7 Libros Recomendados para Costos y Presupuestos - CivilGeeksJarlen Jhennrry Alba VillarroelNo ratings yet
- Farmacia Veterinaria Guia 1Document2 pagesFarmacia Veterinaria Guia 1JUANA MICHEL DIAZ MEJIANo ratings yet
- Heridas ExposicionDocument35 pagesHeridas ExposicionVictor Hugo Garcia CuadradoNo ratings yet