You might also like
- Membership FunctionsDocument35 pagesMembership FunctionsbadamsmithNo ratings yet
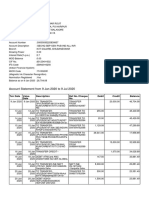
- Account Statement From 9 Jan 2020 To 9 Jul 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument10 pagesAccount Statement From 9 Jan 2020 To 9 Jul 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceAnil Kumar RoutNo ratings yet
- Thermocouple Reference Tables Type N PDFDocument3 pagesThermocouple Reference Tables Type N PDFDarwin CujiNo ratings yet
- CFD Training ManualDocument43 pagesCFD Training Manualgajendra2010No ratings yet
- Handbook of Shock Waves, Three Volume Set by Gabi Ben-Dor, Ozer Igra, Tov Elperin PDFDocument890 pagesHandbook of Shock Waves, Three Volume Set by Gabi Ben-Dor, Ozer Igra, Tov Elperin PDFAnil Kumar RoutNo ratings yet
- Photoelasticity ManualDocument31 pagesPhotoelasticity ManualhimanshusekharpandaNo ratings yet
- Fundamentals of Jet Propulsion With Applications by Ronald D. Flack (ch-7)Document32 pagesFundamentals of Jet Propulsion With Applications by Ronald D. Flack (ch-7)Anil Kumar RoutNo ratings yet
- Neuro-Fuzzy and Soft Computing ReviewedDocument4 pagesNeuro-Fuzzy and Soft Computing ReviewedAnil Kumar RoutNo ratings yet
- Analysis and Fabrication of Polymer Reinforced Fly-Ash Composites EngineDocument6 pagesAnalysis and Fabrication of Polymer Reinforced Fly-Ash Composites EngineAnil Kumar RoutNo ratings yet
- 385908Document11 pages385908Anil Kumar RoutNo ratings yet
- Gas Turbine Technology - MTF 171: Applied MechanicsDocument38 pagesGas Turbine Technology - MTF 171: Applied MechanicsekkyNo ratings yet
- 2d Transient Flow AnalysisDocument13 pages2d Transient Flow AnalysisAnil Kumar RoutNo ratings yet
- Measurements and interpretation of shock tube ignition delay times in highly CO2 diluted mixtures using multiple diagnosticsDocument1 pageMeasurements and interpretation of shock tube ignition delay times in highly CO2 diluted mixtures using multiple diagnosticsAnil Kumar RoutNo ratings yet
- Layout Guide For Journal of Physics: Conference Series Using Microsoft WordDocument11 pagesLayout Guide For Journal of Physics: Conference Series Using Microsoft WordtegarNo ratings yet
- Lectures Compressible FlowDocument59 pagesLectures Compressible FlowAnil Kumar RoutNo ratings yet
- Gaussian Beam Optics FundamentalsDocument14 pagesGaussian Beam Optics FundamentalsKurt PatzikNo ratings yet
- Datasheet Nicrosil enDocument3 pagesDatasheet Nicrosil enAnil Kumar RoutNo ratings yet
- Gaussian Beam OpticsDocument1 pageGaussian Beam OpticsAnil Kumar RoutNo ratings yet
- CDC 10047 DS1Document25 pagesCDC 10047 DS1Anil Kumar RoutNo ratings yet
- Ic Engine LectureDocument36 pagesIc Engine LectureKiran PatelNo ratings yet
- Mayer Joule ExpDocument4 pagesMayer Joule ExpAnil Kumar RoutNo ratings yet
- Abaqus - Cae Users ManualDocument1,306 pagesAbaqus - Cae Users ManualSarhan Karray100% (1)
- 02 Flow FieldsDocument53 pages02 Flow Fieldstolga_enes9949No ratings yet
- CFD Training ManualDocument43 pagesCFD Training Manualgajendra2010No ratings yet
- Corrections PopeDocument8 pagesCorrections PopeAnil Kumar RoutNo ratings yet
- 09a52102 Aerodynamics II PDFDocument6 pages09a52102 Aerodynamics II PDFAnil Kumar RoutNo ratings yet
- NKS 366Document30 pagesNKS 366Anil Kumar RoutNo ratings yet
- Finite Difference Heat EquationDocument6 pagesFinite Difference Heat EquationnitsilcharassamNo ratings yet
- .:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.Document36 pages.:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.franz_passariniNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dewatering Well PointsDocument4 pagesDewatering Well Pointssalloum3No ratings yet
- Hackathon Statements V1Document10 pagesHackathon Statements V1AayushNo ratings yet
- 2VAA001695 en S Control NTCS04 Controller Station Termination UnitDocument43 pages2VAA001695 en S Control NTCS04 Controller Station Termination UnitanbarasanNo ratings yet
- 1136 E01-ML01DP5 Usermanual EN V1.2Document11 pages1136 E01-ML01DP5 Usermanual EN V1.2HectorNo ratings yet
- Materials Technical Specification.: Stainless SteelDocument6 pagesMaterials Technical Specification.: Stainless SteelMario TirabassiNo ratings yet
- Radiograph Evaluation ChecklistDocument2 pagesRadiograph Evaluation ChecklistZulfadli Haron100% (1)
- CD1 ISO/IEC 17000 Conformity Assessment - Vocabulary and General PrinciplesDocument26 pagesCD1 ISO/IEC 17000 Conformity Assessment - Vocabulary and General PrinciplesMAC CONSULTORESNo ratings yet
- Shop SupervisionDocument38 pagesShop SupervisionSakura Yuno Gozai80% (5)
- Vega Plus 69Document3 pagesVega Plus 69yashNo ratings yet
- Margin Philosophy For Science Assessment Studies: EstecDocument11 pagesMargin Philosophy For Science Assessment Studies: EstecFeyippNo ratings yet
- Understanding Logistics and Supply Chain Management ConceptsDocument12 pagesUnderstanding Logistics and Supply Chain Management Conceptsarfat kabraNo ratings yet
- The Truth of Extinction: 7.1 Nietzsche's FableDocument2 pagesThe Truth of Extinction: 7.1 Nietzsche's FableGraciela Barón GuiñazúNo ratings yet
- Board of Intermediate & Secondary Education, Lahore: Tahir Hussain JafriDocument2 pagesBoard of Intermediate & Secondary Education, Lahore: Tahir Hussain Jafridr_azharhayatNo ratings yet
- Schwarzschild Metric and Black Hole HorizonsDocument39 pagesSchwarzschild Metric and Black Hole Horizonsসায়ন চক্রবর্তীNo ratings yet
- Unit 5 - Assessment of One'S Teaching Practice: Universidad de ManilaDocument15 pagesUnit 5 - Assessment of One'S Teaching Practice: Universidad de ManilaDoc Joey100% (3)
- Giljang - Bsn2-A10 - Sas 1-3Document7 pagesGiljang - Bsn2-A10 - Sas 1-3Cherylen Casul GiljangNo ratings yet
- Develop Network Monitoring System IP Subnet CalculatorDocument23 pagesDevelop Network Monitoring System IP Subnet CalculatorabiramanNo ratings yet
- GCSE H3 02g4 02 3D TrigonometryDocument2 pagesGCSE H3 02g4 02 3D TrigonometryAndrei StanescuNo ratings yet
- HR MasterlistDocument6 pagesHR MasterlistLeychelle AnnNo ratings yet
- Action Plan On GadDocument1 pageAction Plan On GadCherish Devora ArtatesNo ratings yet
- Alside Brochure - Zen Windows The TriangleDocument13 pagesAlside Brochure - Zen Windows The TriangleZenWindowsTheTriangleNo ratings yet
- Wiley Wesleyan UniversityDocument36 pagesWiley Wesleyan UniversityBirunda SilvaNo ratings yet
- HWXX 6516DS1 VTM PDFDocument1 pageHWXX 6516DS1 VTM PDFDmitriiSpiridonovNo ratings yet
- 6 Main Rotor Config DesignDocument44 pages6 Main Rotor Config DesignDeepak Paul TirkeyNo ratings yet
- 21st Century Literature Exam SpecsDocument2 pages21st Century Literature Exam SpecsRachel Anne Valois LptNo ratings yet
- Lolita An Intelligent and Charming Holstein Cow Consumes Only TwoDocument1 pageLolita An Intelligent and Charming Holstein Cow Consumes Only Twotrilocksp SinghNo ratings yet
- Amber ToolsDocument309 pagesAmber ToolshkmydreamsNo ratings yet
- Usage Instructions - Hengro PoolProtect 1 - 5Document3 pagesUsage Instructions - Hengro PoolProtect 1 - 5Brian VisserNo ratings yet
- 9-Lesson 5 Direct and Indirect SpeechDocument8 pages9-Lesson 5 Direct and Indirect Speechlaiwelyn100% (4)
- Adopt 2017 APCPI procurement monitoringDocument43 pagesAdopt 2017 APCPI procurement monitoringCA CANo ratings yet