You might also like
- Tutorial Problems 32.3Document2 pagesTutorial Problems 32.3Grace Joy Romias50% (4)
- 01 - Accounting For Managers PDFDocument151 pages01 - Accounting For Managers PDFAmit Kumar PandeyNo ratings yet
- Exam On AC Apparatus (Transformer)Document2 pagesExam On AC Apparatus (Transformer)Kristine ManilagNo ratings yet
- Current-carrying capacity and voltage drop tablesDocument2 pagesCurrent-carrying capacity and voltage drop tablesoneisa92No ratings yet
- Permit Part-2 Process-Oriented Permit in SAPDocument13 pagesPermit Part-2 Process-Oriented Permit in SAPsachinWebDNo ratings yet
- Chapter 3 - EEP5252 - Voltage DropDocument84 pagesChapter 3 - EEP5252 - Voltage Droptaufiqishak09No ratings yet
- Chapter 3-Power Flow Solution-Gauss Seidel 2Document32 pagesChapter 3-Power Flow Solution-Gauss Seidel 2Avianda Sinyo100% (1)
- Banking Finance Agile TestingDocument4 pagesBanking Finance Agile Testinganil1karnatiNo ratings yet
- Earthing Systems ProtectionDocument41 pagesEarthing Systems ProtectionMohamad Azwan Hussain100% (1)
- Cast Resin Busduct PDFDocument48 pagesCast Resin Busduct PDFanand2k1100% (1)
- ECE 261 Power Flow Analysis Step-by-Step GuideDocument6 pagesECE 261 Power Flow Analysis Step-by-Step GuideAhmad Fateh Mohamad NorNo ratings yet
- Cost Analysis Format-Exhaust DyeingDocument1 pageCost Analysis Format-Exhaust DyeingRezaul Karim TutulNo ratings yet
- Financial Ratios ActivityDocument3 pagesFinancial Ratios ActivityNCF- Student Assistants' OrganizationNo ratings yet
- Interview Tips 1Document19 pagesInterview Tips 1mdsd57% (7)
- National Grid Malaysia Power SystemDocument10 pagesNational Grid Malaysia Power SystemDa Harlequin GalNo ratings yet
- 11 WattmeterDocument14 pages11 WattmeterislahidNo ratings yet
- Acdc - Synchronous Motor - Lecture Notes 9Document19 pagesAcdc - Synchronous Motor - Lecture Notes 9Cllyan Reyes100% (1)
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarNo ratings yet
- Chap 7 Solutions PDFDocument34 pagesChap 7 Solutions PDFIbrahim Hussain100% (1)
- ELEN 30104 Polyphase Induction MotorDocument20 pagesELEN 30104 Polyphase Induction MotorBu DakNo ratings yet
- Unit I - Introduction Part - A (2 Marks)Document14 pagesUnit I - Introduction Part - A (2 Marks)Ragul RamNo ratings yet
- Circuit ApplicationsDocument65 pagesCircuit ApplicationsAman Baviskar100% (1)
- ElectricalDocument157 pagesElectricalnaguNo ratings yet
- Instrumentation (Finale)Document20 pagesInstrumentation (Finale)Jonathan BacusNo ratings yet
- 3phim T Slipcharacteristics Problems 181124171548Document22 pages3phim T Slipcharacteristics Problems 181124171548jyothilalNo ratings yet
- Example 8.27Document4 pagesExample 8.27Babasrinivas Guduru100% (1)
- Tutorial 7Document3 pagesTutorial 7Dhivya NNo ratings yet
- Open Circuit Saturation Curve of An Alternator-EXPT8Document2 pagesOpen Circuit Saturation Curve of An Alternator-EXPT8Karl Joseph Chua Villariña100% (3)
- DC Machines and Transformers Lab ManualDocument50 pagesDC Machines and Transformers Lab ManualSuseel MenonNo ratings yet
- Lap WindingDocument13 pagesLap WindingSyah RoniNo ratings yet
- Magnetic Circuit Reluctance and Ampere TurnsDocument10 pagesMagnetic Circuit Reluctance and Ampere TurnsdtrhNo ratings yet
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Document4 pagesHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Auto TransformerDocument5 pagesAuto TransformerAugy HaerudyNo ratings yet
- Pse Problems Group AssignmentDocument14 pagesPse Problems Group AssignmentSajid KhanNo ratings yet
- Laboratory Manual: Electrical Machine Lab-IIDocument52 pagesLaboratory Manual: Electrical Machine Lab-IIpardeepNo ratings yet
- Cap02 Maquinas SincronicasDocument43 pagesCap02 Maquinas SincronicasJulio Begazo PeñaNo ratings yet
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDocument5 pagesA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNo ratings yet
- Glover 10 ExDocument13 pagesGlover 10 ExAseel Bait MaditNo ratings yet
- Power System Compensation Using Passive and Facts Controller NumericalDocument11 pagesPower System Compensation Using Passive and Facts Controller Numericalsoumyadeep mukherjeeNo ratings yet
- EE220 Economic Operations Exam 2Document2 pagesEE220 Economic Operations Exam 2uplbseles0% (1)
- Assignment 1Document2 pagesAssignment 1Shabih100% (1)
- AparatusDocument187 pagesAparatusNorman Jay GarciaNo ratings yet
- Power Electronics & Drives: Unit: 1 Power Semiconductor DevicesDocument24 pagesPower Electronics & Drives: Unit: 1 Power Semiconductor DevicesTapobroto ChatterjeeNo ratings yet
- Types of Armature WindingDocument2 pagesTypes of Armature WindingCastello Akar100% (1)
- EPE491 Three Phase Circuits TutorialDocument2 pagesEPE491 Three Phase Circuits TutorialMohdFirdausNo ratings yet
- Eec 752 Electronic Circuit Design LabDocument1 pageEec 752 Electronic Circuit Design LabAnonymous eWMnRr70q75% (4)
- Symmetrical Fault Analysis ChapterDocument26 pagesSymmetrical Fault Analysis ChapterBelayneh TadesseNo ratings yet
- Voltage Regulation of Three-Phase AlternatorDocument10 pagesVoltage Regulation of Three-Phase AlternatorNAYEEM100% (1)
- Experiment 1Document3 pagesExperiment 1Ariel GamboaNo ratings yet
- Pw6 Three Phase System v1Document6 pagesPw6 Three Phase System v1Hairul Anuar MasrolNo ratings yet
- HW4 SolutionsDocument10 pagesHW4 SolutionsBrooklyn Luqii100% (1)
- Basic Electronics Project Documentation TemplateDocument3 pagesBasic Electronics Project Documentation Templaterazee_No ratings yet
- VP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsDocument5 pagesVP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsNiño John JaymeNo ratings yet
- Managing Production and Service OperationsDocument9 pagesManaging Production and Service OperationsJohn Rexel CaroNo ratings yet
- Assignment 2 On Electromechanical InstrumentsDocument3 pagesAssignment 2 On Electromechanical InstrumentsSumit RaiNo ratings yet
- Asynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsDocument13 pagesAsynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction Motorstrek juneNo ratings yet
- EE Laws QuizDocument9 pagesEE Laws QuizJiever AustriaNo ratings yet
- Transformer Design Module 2 NewDocument17 pagesTransformer Design Module 2 NewRajath SuryaNo ratings yet
- Zener Diode and Diode ApplicationDocument62 pagesZener Diode and Diode Applicationnibar dyllanNo ratings yet
- Chapter 4Document24 pagesChapter 4javeria zafeerNo ratings yet
- Chapter 5 PDFDocument45 pagesChapter 5 PDFAnnieNo ratings yet
- DC Motors: Characteristics, Control, ApplicationsDocument16 pagesDC Motors: Characteristics, Control, ApplicationsBelayet RonyNo ratings yet
- DC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSDocument7 pagesDC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSKelvin LiewNo ratings yet
- Electrics Questions2Document14 pagesElectrics Questions2HEY DOSTUMNo ratings yet
- Synchronous Machine ProblemsDocument5 pagesSynchronous Machine Problemsbhuvana71No ratings yet
- AC MachinesDocument41 pagesAC Machineskr_abhijeet72356587No ratings yet
- Introduction To Robotics: Laboratory ManualDocument10 pagesIntroduction To Robotics: Laboratory ManualEngr Hamza Ali ImranNo ratings yet
- Lab - 09 - Itr (2) Intro To RoboticsDocument7 pagesLab - 09 - Itr (2) Intro To RoboticsEngr Hamza Ali ImranNo ratings yet
- Lab+01-Itr (1) Intro To RoboticsDocument11 pagesLab+01-Itr (1) Intro To RoboticsEngr Hamza Ali ImranNo ratings yet
- Lab - 07 - Itr (1) Intro To RoboticsDocument7 pagesLab - 07 - Itr (1) Intro To RoboticsEngr Hamza Ali ImranNo ratings yet
- Intro To Robotics (Grubler's Formula Practice Question)Document1 pageIntro To Robotics (Grubler's Formula Practice Question)Engr Hamza Ali ImranNo ratings yet
- EntrepreneurshipDocument18 pagesEntrepreneurshipEngr Hamza Ali ImranNo ratings yet
- Lecture 03 Average Load, Load Factor, Demand Factor, Diversity FactorDocument29 pagesLecture 03 Average Load, Load Factor, Demand Factor, Diversity FactorUsamaMujahidNo ratings yet
- Lab - 08 - Itr Intro To RoboticsDocument5 pagesLab - 08 - Itr Intro To RoboticsEngr Hamza Ali ImranNo ratings yet
- Plugging An Induction MotorDocument23 pagesPlugging An Induction MotorEngr Hamza Ali ImranNo ratings yet
- Load Characteristics, Load Curve, Load Factor and Max Demand Detals SlidesDocument15 pagesLoad Characteristics, Load Curve, Load Factor and Max Demand Detals SlidesEngr Hamza Ali ImranNo ratings yet
- Main features of salient pole rotors for hydropower generatorsDocument31 pagesMain features of salient pole rotors for hydropower generatorsEngr Hamza Ali ImranNo ratings yet
- Lecture1 DSP 16012017Document5 pagesLecture1 DSP 16012017Engr Hamza Ali ImranNo ratings yet
- Lecture 29Document29 pagesLecture 29Engr Hamza Ali ImranNo ratings yet
- Induction Motor Operating As A Generator 1: Electro Mechanical SystemDocument11 pagesInduction Motor Operating As A Generator 1: Electro Mechanical SystemEngr Hamza Ali ImranNo ratings yet
- Types and Classifications of 3-Phase Induction MotorsDocument24 pagesTypes and Classifications of 3-Phase Induction MotorsEngr Hamza Ali ImranNo ratings yet
- Torque-Speed Characteristics of 3-Phase Induction MotorsDocument30 pagesTorque-Speed Characteristics of 3-Phase Induction MotorsEngr Hamza Ali ImranNo ratings yet
- Q1 Sol Part 1 ADocument1 pageQ1 Sol Part 1 AEngr Hamza Ali ImranNo ratings yet
- Packet Sniffing and IPv4 HeaderDocument24 pagesPacket Sniffing and IPv4 HeaderEngr Hamza Ali ImranNo ratings yet
- Electromagentic ProblemsDocument1 pageElectromagentic ProblemsEngr Hamza Ali ImranNo ratings yet
- Electromagnetic Field Theory: Total Marks 100 Student-IdDocument1 pageElectromagnetic Field Theory: Total Marks 100 Student-IdSana JafarNo ratings yet
- A Survey of Transport Protocols ForWireless SensorDocument7 pagesA Survey of Transport Protocols ForWireless SensorEngr Hamza Ali ImranNo ratings yet
- Real-Time Java and ATCDocument44 pagesReal-Time Java and ATCdnk_victon6248No ratings yet
- ROUTERDocument26 pagesROUTERIsraelNo ratings yet
- Chapter 4-Ohm's LawDocument12 pagesChapter 4-Ohm's LawErin LoveNo ratings yet
- How To Use Oracle Account Generator For Project Related TransactionsDocument40 pagesHow To Use Oracle Account Generator For Project Related Transactionsapnambiar88No ratings yet
- Quiz UtpDocument7 pagesQuiz UtplesterNo ratings yet
- Open Recruitment Member Kejar Mimpi Periode 2023 (Responses)Document22 pagesOpen Recruitment Member Kejar Mimpi Periode 2023 (Responses)Sophia Dewi AzzahraNo ratings yet
- Stock Futures Are Flat in Overnight Trading After A Losing WeekDocument2 pagesStock Futures Are Flat in Overnight Trading After A Losing WeekVina Rahma AuliyaNo ratings yet
- Dhilshahilan Rajaratnam: Work ExperienceDocument5 pagesDhilshahilan Rajaratnam: Work ExperienceShazard ShortyNo ratings yet
- Rural Perception of SUV CarsDocument29 pagesRural Perception of SUV CarsritusinNo ratings yet
- G C Reddy ProfileDocument3 pagesG C Reddy ProfileG.C.ReddyNo ratings yet
- ReportDocument4 pagesReportapi-463513182No ratings yet
- Chapter 7 - Trade and Investment EnvironmentDocument7 pagesChapter 7 - Trade and Investment EnvironmentMa. Cristel Rovi RibucanNo ratings yet
- Newspaper CritiqueDocument4 pagesNewspaper CritiquebojoiNo ratings yet
- Letter Advocating For Hazard PayDocument2 pagesLetter Advocating For Hazard PayQueens PostNo ratings yet
- Indian Banking SystemDocument10 pagesIndian Banking SystemSony ChandranNo ratings yet
- Hutchinson - Le Joint Francais - National O-RingDocument25 pagesHutchinson - Le Joint Francais - National O-RingkikorrasNo ratings yet
- QPMC Rate CardsDocument9 pagesQPMC Rate CardsTarek TarekNo ratings yet
- Leader in CSR 2020: A Case Study of Infosys LTDDocument19 pagesLeader in CSR 2020: A Case Study of Infosys LTDDr.Rashmi GuptaNo ratings yet
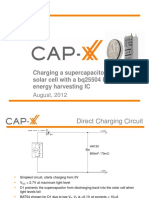
- 1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFDocument12 pages1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFmehralsmenschNo ratings yet
- Keystone - Contractors - Book 16 05 12 FinalDocument9 pagesKeystone - Contractors - Book 16 05 12 Finalfb8120No ratings yet
- Mphasis Placement PaperDocument3 pagesMphasis Placement PapernagasaikiranNo ratings yet
- March 2017Document11 pagesMarch 2017Anonymous NolO9drW7MNo ratings yet
- D882 - Pruebas A Películas.Document11 pagesD882 - Pruebas A Películas.CamiloSilvaNo ratings yet