You might also like
- Ecuaciones de Movimiento de Cinética Plana (Exposicion)Document5 pagesEcuaciones de Movimiento de Cinética Plana (Exposicion)Sarah Gonzales0% (1)
- Cinematica Plana de Un Cuerpo RigidoDocument57 pagesCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- 5.2 Ecuaciones de MovimientoDocument5 pages5.2 Ecuaciones de MovimientoAlexis García100% (1)
- Movimiento de Varias Partículas PDFDocument2 pagesMovimiento de Varias Partículas PDFelkmaleonNo ratings yet
- Aplicación de La Ecuación de Bernoulli - 4Document13 pagesAplicación de La Ecuación de Bernoulli - 4Leo RamirezNo ratings yet
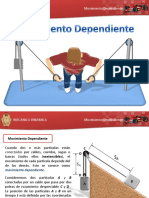
- Movimiento Dependiente PDFDocument9 pagesMovimiento Dependiente PDFMaite ZuritaNo ratings yet
- TrabajoDocument2 pagesTrabajoMaryorieDominguezNo ratings yet
- Teorema Fundamental de La HidrostáticaDocument2 pagesTeorema Fundamental de La HidrostáticaKamaleon Mamoru-kun Enriquez Sanchez0% (1)
- El Rotor de Un Motor Eléctrico Tiene Una Masa de 25 KG y Un Radio de Giro de 180 MMDocument6 pagesEl Rotor de Un Motor Eléctrico Tiene Una Masa de 25 KG y Un Radio de Giro de 180 MMJuank Almeida0% (1)
- Cinemática plana del cuerpo rígidoDocument10 pagesCinemática plana del cuerpo rígidoDavid RamirezNo ratings yet
- Problemas de cinemáticaDocument6 pagesProblemas de cinemáticaSebastian Martinez CuautencoNo ratings yet
- Cinemática plana de cuerpos rígidos: velocidades en engranes, piñones y cremallerasDocument8 pagesCinemática plana de cuerpos rígidos: velocidades en engranes, piñones y cremallerasANDRES QUINALUISANo ratings yet
- 2.4 Esfuerzos y Direcciones PrincipalesDocument28 pages2.4 Esfuerzos y Direcciones PrincipalesEVELYN GARRIDO SOLORIONo ratings yet
- Movimiento de rotación alrededor de un eje fijoDocument6 pagesMovimiento de rotación alrededor de un eje fijokarlos0% (1)
- Transformaciones de Esfuerzos y DeformacionesDocument23 pagesTransformaciones de Esfuerzos y DeformacionesRosalyn AVNo ratings yet
- Diagrama de Esfuerzo Deformacion - Ley de HookeDocument7 pagesDiagrama de Esfuerzo Deformacion - Ley de HookeFrank Acosta ZamoraNo ratings yet
- Descripción Matemática de La DeformaciónDocument35 pagesDescripción Matemática de La DeformaciónAlexis GrijalvaNo ratings yet
- Problemario Unidad 2-DinámicaDocument11 pagesProblemario Unidad 2-DinámicaAmethyst Smith100% (1)
- Trabajo y Energi A para Un Cuerpo RigidoDocument6 pagesTrabajo y Energi A para Un Cuerpo RigidoErnyJoseVelasquez67% (3)
- Guia Medidas Tendencia CentralDocument4 pagesGuia Medidas Tendencia Centralegrem50% (2)
- Centro de Gravedad de Un Cuerpo TridimensionalDocument12 pagesCentro de Gravedad de Un Cuerpo TridimensionalEripillo Rodarte0% (1)
- Investigación Unidad 7 FricciónDocument9 pagesInvestigación Unidad 7 FricciónJesús CastilloNo ratings yet
- 5.5 Movimiento de Un Cuerpo RigidoDocument5 pages5.5 Movimiento de Un Cuerpo RigidoChucho MoralesNo ratings yet
- Cinetica de Cuerpos Rigidos CapituloDocument21 pagesCinetica de Cuerpos Rigidos CapituloCesar HernandezNo ratings yet
- Mecánica clásica: conservación de la cantidad de movimiento y la energíaDocument17 pagesMecánica clásica: conservación de la cantidad de movimiento y la energíaeduardo0% (1)
- Deformación unitaria: transformación y conceptos básicosDocument27 pagesDeformación unitaria: transformación y conceptos básicosCristian ZavaletaNo ratings yet
- Dinámica de mecanismos y ejercicios de velocidad y aceleraciónDocument12 pagesDinámica de mecanismos y ejercicios de velocidad y aceleraciónEduardo CseNo ratings yet
- Cinemática Movimiento PartículasDocument46 pagesCinemática Movimiento PartículasYahir PgNo ratings yet
- ... Informe de Dinamica N 7 Impulso y Cantidad de MovimientoDocument11 pages... Informe de Dinamica N 7 Impulso y Cantidad de MovimientoEDGAR SYDNEY MUÑOZ TAFURNo ratings yet
- Dinamica Ejercicios CAP. 17-18-19Document6 pagesDinamica Ejercicios CAP. 17-18-19Pablo RiojaNo ratings yet
- 4.3 Circulo de Mohr para DeformacionDocument4 pages4.3 Circulo de Mohr para Deformacionfabiola MATIASNo ratings yet
- Teorema de Steiner para calcular momentos de inerciaDocument2 pagesTeorema de Steiner para calcular momentos de inerciajosefa reyes100% (1)
- Coordenadas Normales y TangencialesDocument2 pagesCoordenadas Normales y TangencialesEduardo Gastelo Cayotopa0% (1)
- Representación de Un Sistema Mediante Una Llave de TorsiónDocument4 pagesRepresentación de Un Sistema Mediante Una Llave de TorsiónKenyi Hidalgo DiazNo ratings yet
- Clase #07 Resistencia de Materiales - Esfuerzos CombinadosDocument13 pagesClase #07 Resistencia de Materiales - Esfuerzos CombinadosPedro CasaresNo ratings yet
- Exposicion La OficialDocument16 pagesExposicion La OficialMoises Orozco CruzNo ratings yet
- Componente Práctico Final-Christian Ismael Diaz MallaDocument41 pagesComponente Práctico Final-Christian Ismael Diaz MallaChristian Ismael Diaz100% (1)
- Rotación Con Respecto A Un Eje Fijo (Autoguardado)Document7 pagesRotación Con Respecto A Un Eje Fijo (Autoguardado)Kelly AstochadoNo ratings yet
- Cinética de Partículas - ImpactoDocument8 pagesCinética de Partículas - ImpactoGustavo Adán MendozaNo ratings yet
- Luctuala Taller 3,4Document2 pagesLuctuala Taller 3,4Mireya LuctualaNo ratings yet
- Semana 10 Ejercicio 19.6 - 19.7Document3 pagesSemana 10 Ejercicio 19.6 - 19.7Juliana Toledo MartelNo ratings yet
- 1.5. Esfuerzo Biaxial (Esfuerzo en Planos Inclinados) : X y DX Dy, ZDocument4 pages1.5. Esfuerzo Biaxial (Esfuerzo en Planos Inclinados) : X y DX Dy, ZAngel MartinezNo ratings yet
- Dinámica y energía de rotaciónDocument28 pagesDinámica y energía de rotaciónDevran SmithNo ratings yet
- Capitulo 18 Cinetica Plana de Un CuerpoDocument7 pagesCapitulo 18 Cinetica Plana de Un CuerpoNicoll CoronadoNo ratings yet
- Resolución de problemas de mecánica con resortesDocument16 pagesResolución de problemas de mecánica con resortesFernando Salazar GautrinNo ratings yet
- Centro Instantáneo de Velocidad CeroDocument13 pagesCentro Instantáneo de Velocidad CeroMan Ga Pe100% (1)
- Impulso y Cantidad de Movimiento LinealDocument3 pagesImpulso y Cantidad de Movimiento LinealAngel D. CárdenasNo ratings yet
- Energía cinética de cuerpos rígidos en movimiento plano (≤40Document3 pagesEnergía cinética de cuerpos rígidos en movimiento plano (≤40PaulFernando100% (1)
- Lectura Complementaria 4Document34 pagesLectura Complementaria 4Michael ObrayanNo ratings yet
- Sistemas Auxiliares y Medios de LocomociónDocument2 pagesSistemas Auxiliares y Medios de Locomociónjooana perezNo ratings yet
- Cinetica de La Particula - RectangularesDocument3 pagesCinetica de La Particula - RectangularesDerick Guambo0% (2)
- Problemas CapDocument6 pagesProblemas CapCristhianAlexanderVega0% (2)
- Exposicion Unidad 3 Estado de EsfuerzosDocument40 pagesExposicion Unidad 3 Estado de EsfuerzosJeronimo50% (2)
- Problemas Resueltos de Trabajo y Energia en El Cuerpo RigidoDocument8 pagesProblemas Resueltos de Trabajo y Energia en El Cuerpo RigidoMarjorie Camizan Flores67% (3)
- Ecuación de Gruebler calcula grados libertad mecanismosDocument5 pagesEcuación de Gruebler calcula grados libertad mecanismosSvart BegravelseNo ratings yet
- 2.1 Condiciones para El Equilibrio de ParticulasDocument2 pages2.1 Condiciones para El Equilibrio de ParticulasBRAULIO GENARO CELEDONIO LARANo ratings yet
- Separata-Movimiento Plano de Cuerpo RigidoDocument14 pagesSeparata-Movimiento Plano de Cuerpo RigidoIoel QcNo ratings yet
- Modulo Movimiento Plano de Cuerpo RigidoDocument14 pagesModulo Movimiento Plano de Cuerpo Rigidojuan carlos huaman allccaNo ratings yet
- Modulo Movimiento Plano de Cuerpo RigidoDocument14 pagesModulo Movimiento Plano de Cuerpo RigidowalterNo ratings yet
- INVESTIGACION - UNIDAD III - GALLEGOS - 3367 (Recuperado Automáticamente)Document26 pagesINVESTIGACION - UNIDAD III - GALLEGOS - 3367 (Recuperado Automáticamente)Edgar GallegosNo ratings yet
- Programa Arq MoranterminadoDocument2 pagesPrograma Arq MoranterminadoManuel llerenaNo ratings yet
- TDR DCH 2023-2Document7 pagesTDR DCH 2023-2Mariana Lizeth Junco MunozNo ratings yet
- Informe Charla REVIT - Rafael SalazarDocument2 pagesInforme Charla REVIT - Rafael SalazarRafael SalazarNo ratings yet
- 7 Cosechadora A8000Document30 pages7 Cosechadora A8000carlos fajardo g.100% (1)
- PETS-IZAJE, CARGA YO DESCARGA DE EQUIPOS Y MATERIALES DE LA PTAR-SBR 25m3dia - SMCDocument3 pagesPETS-IZAJE, CARGA YO DESCARGA DE EQUIPOS Y MATERIALES DE LA PTAR-SBR 25m3dia - SMCKevin Vergara IglesiasNo ratings yet
- Pedcti CesarDocument669 pagesPedcti CesarSanchez JhonNo ratings yet
- Envasado ActivoDocument58 pagesEnvasado ActivonatashaNo ratings yet
- Preguntas Del Caso NetlfixDocument7 pagesPreguntas Del Caso NetlfixErickson Eduardo Landaverde MuñozNo ratings yet
- Regimen DisciplinarioDocument11 pagesRegimen DisciplinarioNaomi Kiara Lazo CampanaNo ratings yet
- Mapama PDFDocument4 pagesMapama PDFmagyNo ratings yet
- Implementación de inventariosDocument2 pagesImplementación de inventariosLuisAlbertoCastroApodacaNo ratings yet
- Delphi: Embarcadero, historia y característicasDocument24 pagesDelphi: Embarcadero, historia y característicasjoseph chavezNo ratings yet
- Modos de TransmisiónDocument8 pagesModos de TransmisiónYesica Paola Pinzon Rojas0% (1)
- Apu. Planta de TratamientoDocument14 pagesApu. Planta de Tratamientojeysonramirezramos100% (1)
- Tema 1 Introducción y Entorno de ProyectosDocument43 pagesTema 1 Introducción y Entorno de ProyectosJAIRONo ratings yet
- Políticas CONDITODocument8 pagesPolíticas CONDITOcarolina conditoNo ratings yet
- Obligaciones formales para llevar libros y registros contablesDocument109 pagesObligaciones formales para llevar libros y registros contablesJorge Aguilar AlcaldeNo ratings yet
- Ciencia políticaDocument14 pagesCiencia políticaEMMANUEL9408No ratings yet
- Oportunidades de un ejecutivo en AmazonDocument6 pagesOportunidades de un ejecutivo en Amazonyahiro miguel vera lindaoNo ratings yet
- Sistema Financiero Mexicano: Autoridades y FuncionesDocument19 pagesSistema Financiero Mexicano: Autoridades y FuncionesStephany Asuncion Cruz HernandezNo ratings yet
- HarleyDocument10 pagesHarleyFran Carolina Jara Herrera0% (2)
- Variadores de velocidad: control, EMC y frenadoDocument8 pagesVariadores de velocidad: control, EMC y frenadoJorge Alberto Quiza PolaniaNo ratings yet
- Ejercicios Resueltos de Programacion LinealDocument68 pagesEjercicios Resueltos de Programacion LinealArthuro EscuderoNo ratings yet
- Según Los Criterios MicrobiológicosDocument16 pagesSegún Los Criterios MicrobiológicosKenny Junior Mercedes RojasNo ratings yet
- GuAa PrA Ctica para La GestiA3n Ambiental Walss Aurioles Rodolfo Author PDFDocument458 pagesGuAa PrA Ctica para La GestiA3n Ambiental Walss Aurioles Rodolfo Author PDF爱Gaara100% (1)
- Niif 15Document29 pagesNiif 15Abigail Yepez EsquivelNo ratings yet
- Lina Cuadro Comparativo Tipos de PielDocument7 pagesLina Cuadro Comparativo Tipos de Piellina marcela100% (1)
- Factura de venta de recolección y disposición de residuos especialesDocument1 pageFactura de venta de recolección y disposición de residuos especialesOscar Andres LozanoNo ratings yet
- Actividad Sobre La Nic 29Document2 pagesActividad Sobre La Nic 29Manuel AcostaNo ratings yet