You might also like
- Chapitre6 MCCDocument11 pagesChapitre6 MCCmaroua belhadjNo ratings yet
- Electrotechnique 2 GET - Chap III - Machine SynchroneDocument13 pagesElectrotechnique 2 GET - Chap III - Machine Synchronerajaa latifiNo ratings yet
- Production Et Distribution de L'énergie ÉlectriqueDocument59 pagesProduction Et Distribution de L'énergie ÉlectriquemaronnamNo ratings yet
- Serie 3Document6 pagesSerie 3Dadli BeeNo ratings yet
- TD5 - Electronique de PuissanceDocument3 pagesTD5 - Electronique de PuissanceMOHAMED ACHLIOUINo ratings yet
- Chap3 Machine AsynchroneDocument41 pagesChap3 Machine AsynchroneIlyas NahiNo ratings yet
- Exercices AlternateurDocument13 pagesExercices AlternateurismailNo ratings yet
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسNo ratings yet
- Ener1 - CM2 - TriphaséDocument37 pagesEner1 - CM2 - Triphasépierre_maréchal0% (1)
- TD Avec Solution MASDocument79 pagesTD Avec Solution MASOűłď Ællēm MöĥãmëdNo ratings yet
- 4.1. Convertisseur1Document23 pages4.1. Convertisseur1Omar BarmakiNo ratings yet
- TD OnduleursDocument3 pagesTD OnduleursFatima EzzahraNo ratings yet
- Machine Courant ContinuDocument3 pagesMachine Courant Continu11minutemail100% (1)
- 2-Cours Machine À Courant ContinuDocument28 pages2-Cours Machine À Courant ContinuNírmo NìroNo ratings yet
- TP 6 Machines Electriques 2Document7 pagesTP 6 Machines Electriques 2REZONo ratings yet
- TDs-Transf Mono 2020Document3 pagesTDs-Transf Mono 2020Marouane BoussellamiNo ratings yet
- exoMS 1415Document16 pagesexoMS 1415Abd Errezak Chahoub0% (1)
- Serie TD 1 2 ElectrotechDocument3 pagesSerie TD 1 2 ElectrotechPFENo ratings yet
- TP 03 CompletDocument12 pagesTP 03 CompletMustapha BeziouiNo ratings yet
- TD Modelisation MCCDocument6 pagesTD Modelisation MCCcours importantNo ratings yet
- Corrige Chap3 Exo1Document2 pagesCorrige Chap3 Exo1Said ZaidiNo ratings yet
- TD 12021Document2 pagesTD 12021blbmalekNo ratings yet
- TD 2017Document7 pagesTD 2017BerLin DzNo ratings yet
- EP Chap-4 2 HacheursDocument25 pagesEP Chap-4 2 HacheursMAS FATAL0% (1)
- Exercices Corrigés Moteur Synchrone - Cours TechProDocument4 pagesExercices Corrigés Moteur Synchrone - Cours TechProImane ZahiriNo ratings yet
- Chapitre7 MCC PDFDocument13 pagesChapitre7 MCC PDFAyoub SinaNo ratings yet
- TD4 2021Document3 pagesTD4 2021Abdou ElakNo ratings yet
- Machine Synchrone Cours TGMDocument6 pagesMachine Synchrone Cours TGMSaid Mamou100% (3)
- Batteries Enj Doc EleveDocument12 pagesBatteries Enj Doc EleveYoussef El FahimeNo ratings yet
- Chapitre04 PDFDocument7 pagesChapitre04 PDFجمال طيبيNo ratings yet
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDocument2 pagesTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriNo ratings yet
- AlternateurDocument3 pagesAlternateurRachid Bba100% (2)
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantNo ratings yet
- Re ch2 PDFDocument20 pagesRe ch2 PDFيونس سليميNo ratings yet
- Graduate UrDocument13 pagesGraduate UrBri CoolNo ratings yet
- Schéma Équivalent Et Caractéristique Mécanique Du Moteur AsynchroneDocument9 pagesSchéma Équivalent Et Caractéristique Mécanique Du Moteur Asynchroneعبد الله هادي القرطبيNo ratings yet
- TP Moteur Monophasé EEA1Document7 pagesTP Moteur Monophasé EEA1akramNo ratings yet
- TP1 4eme Altern Synch Electro - CDocument3 pagesTP1 4eme Altern Synch Electro - CilyNo ratings yet
- Chapitre 2 Introduction Aux Convertisseur Statique - EtudientDocument7 pagesChapitre 2 Introduction Aux Convertisseur Statique - EtudientMohamed Yacine Rachedi100% (1)
- Regime TransitoireDocument7 pagesRegime TransitoireMohamed CHARIFNo ratings yet
- TD Alternateur 20-21Document5 pagesTD Alternateur 20-21RabbiNo ratings yet
- CH12Document7 pagesCH12Naseredine BougatayaNo ratings yet
- Cours Master2 ChapitreIDocument18 pagesCours Master2 ChapitreIerenoNo ratings yet
- Série 03 - Trans - MonoDocument18 pagesSérie 03 - Trans - MonoBouchaib SouheilNo ratings yet
- PIC Le Jeu D'instructionDocument27 pagesPIC Le Jeu D'instructionAntonio Saba100% (1)
- CHAPITRE 8 Machines SynchroneDocument6 pagesCHAPITRE 8 Machines SynchroneHakim Dokmane100% (1)
- Le Couplage Inductif ch1,2Document7 pagesLe Couplage Inductif ch1,2Oussama LamhiliNo ratings yet
- TD CemDocument4 pagesTD CemdansokomahaNo ratings yet
- MemoireDocument85 pagesMemoireGherib AlmoutassimbellahNo ratings yet
- essaisTransformateurMono PDFDocument5 pagesessaisTransformateurMono PDFNawres MsakniNo ratings yet
- Chapitre II Dimensionnement Et Conceptio 2Document29 pagesChapitre II Dimensionnement Et Conceptio 2YahyaNo ratings yet
- Serie TD - N°03 - Cde MEDocument4 pagesSerie TD - N°03 - Cde MESamti AhmatNo ratings yet
- CGHHDocument21 pagesCGHHdhouhaNo ratings yet
- Bon TD Bases D'electroniqueDocument18 pagesBon TD Bases D'electroniqueArmand EssNo ratings yet
- Electrotechnique 2 GET - Chap I - Machine A Courant ContinuDocument15 pagesElectrotechnique 2 GET - Chap I - Machine A Courant Continurajaa latifiNo ratings yet
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabFrom EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabNo ratings yet
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesFrom EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesNo ratings yet
- Screenshot 2021-03-22 at 05.05.06Document1 pageScreenshot 2021-03-22 at 05.05.06Abderrahmane WardiNo ratings yet
- transistorJFETv1 1 0Document33 pagestransistorJFETv1 1 0abdo08100% (1)
- Les OscillateursDocument9 pagesLes Oscillateursحنيش يوسف0% (1)
- FR 011216 151011 ME FGSQHQ PDFDocument12 pagesFR 011216 151011 ME FGSQHQ PDFAbderrahmane WardiNo ratings yet
- Chapitre 4 - GradateurDocument30 pagesChapitre 4 - GradateurAbderrahmane Wardi100% (1)
- KKKKKKKKKKDocument4 pagesKKKKKKKKKKAbderrahmane WardiNo ratings yet
- Cours Electrotechnique AvancÉ eDocument1 pageCours Electrotechnique AvancÉ eAbderrahmane WardiNo ratings yet
- Cours Electrotechnique AvancÉ eDocument42 pagesCours Electrotechnique AvancÉ eAbderrahmane WardiNo ratings yet
- BTS PHY 98 BisDocument7 pagesBTS PHY 98 BiskernoNo ratings yet
- Cours Electrotechnique AvancÉ eDocument42 pagesCours Electrotechnique AvancÉ eAbderrahmane WardiNo ratings yet
- HOW-To THRSim11 Simulation Setup (Bales) 20060828v01Document3 pagesHOW-To THRSim11 Simulation Setup (Bales) 20060828v01Abderrahmane WardiNo ratings yet
- BTS Phy 96Document12 pagesBTS Phy 96Abderrahmane WardiNo ratings yet
- IjDocument7 pagesIjAbderrahmane WardiNo ratings yet
- Cours STS1 05 RedresseursDocument21 pagesCours STS1 05 RedresseursLi Jarmouni IINo ratings yet
- ACCOUPLEMENTDocument6 pagesACCOUPLEMENTMyr NahNo ratings yet
- Le Moteur A Courant ContinuDocument49 pagesLe Moteur A Courant ContinuJalel Khediri100% (3)
- 6.2 LA NORMALISATION-pointsDocument2 pages6.2 LA NORMALISATION-pointsestellesalivetNo ratings yet
- TP PontToutThyristorsDocument6 pagesTP PontToutThyristorsSalomon ZeusNo ratings yet
- 3 en 1 Servomoteur de Vanne Et RégulateurDocument12 pages3 en 1 Servomoteur de Vanne Et Régulateurhito gameNo ratings yet
- FR en de NL Es PT It El Ru Uk KK Ar FaDocument35 pagesFR en de NL Es PT It El Ru Uk KK Ar FaIsumeeru Yashin0% (1)
- Catalogo Eglo Outdoor Luminaires 2021Document220 pagesCatalogo Eglo Outdoor Luminaires 2021F GasparNo ratings yet
- Résumé Des Systèmes A320Document45 pagesRésumé Des Systèmes A320ScribdTranslationsNo ratings yet
- RTA Renault Laguna 3Document3,402 pagesRTA Renault Laguna 3julia100% (2)
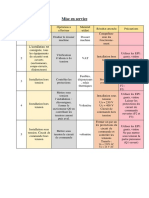
- Mise en ServiceDocument2 pagesMise en Servicekhamis youssoufNo ratings yet
- FrancaisDocument298 pagesFrancaisLou Karim100% (1)
- AaaaDocument6 pagesAaaaKhaled BenlekhalNo ratings yet
- Quick Installation Guide - HMS-2000-4T Series - Global - FR - REV1.4Document2 pagesQuick Installation Guide - HMS-2000-4T Series - Global - FR - REV1.4lauvergnatjeanNo ratings yet
- Fiche Maintenance GeDocument1 pageFiche Maintenance GeMoustapha NdiayeNo ratings yet
- Notice Icarsoft CR MaxDocument162 pagesNotice Icarsoft CR Maxben hamidaNo ratings yet
- Controle Transmission de MouvementDocument3 pagesControle Transmission de MouvementTelli TarekNo ratings yet
- Thyristor PDFDocument21 pagesThyristor PDFsiham100% (1)
- Composant D'une Pompe À EauDocument12 pagesComposant D'une Pompe À EauAbdellatif BelkhairNo ratings yet
- Coolmay L02 Series PLC Progarmming ManualDocument116 pagesCoolmay L02 Series PLC Progarmming Manualsalah hadriNo ratings yet
- Matériel de TerrassementDocument20 pagesMatériel de TerrassementAdam BoussairiNo ratings yet
- Section11 PDFDocument11 pagesSection11 PDFJose Miguel Oyola CoronadoNo ratings yet
- Descriptif: Permet L'assemblage Et Le Démontage Mécanique D'une Bride Avec Une Canalisation PVCDocument2 pagesDescriptif: Permet L'assemblage Et Le Démontage Mécanique D'une Bride Avec Une Canalisation PVCYOUDBIB YoussefNo ratings yet
- Man Tec Saxo SommaireDocument204 pagesMan Tec Saxo SommaireAna Esteves67% (3)
- 17 - Démontage RemontageDocument32 pages17 - Démontage RemontageAhmedmahNo ratings yet
- Chapitre 9 - MCC IndependanteDocument15 pagesChapitre 9 - MCC IndependanteChakib Ka100% (1)
- Vidange BvaDocument4 pagesVidange Bvaludovic59195No ratings yet
- Manual de Taller Renault Clio II - 08 TransmisionDocument0 pagesManual de Taller Renault Clio II - 08 TransmisionCarlos CastilloNo ratings yet
- 2013 - HD - Softail - 2013 FXSBSE PDFDocument390 pages2013 - HD - Softail - 2013 FXSBSE PDFkevin7stelzerNo ratings yet
- Activite No1 Ordinateur Et Peripheriques CorrigeDocument2 pagesActivite No1 Ordinateur Et Peripheriques CorrigeRach AbNo ratings yet
- Fiche Technique Sportage Avril 2020Document2 pagesFiche Technique Sportage Avril 2020Omar BouamoudNo ratings yet