You might also like
- Self Driving CarDocument61 pagesSelf Driving Carimmi1989No ratings yet
- Google Car and Autonomous VehiclesDocument19 pagesGoogle Car and Autonomous VehiclesdeepakNo ratings yet
- Google's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearDocument21 pagesGoogle's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearShivam KumarNo ratings yet
- Google Self Driving CarDocument18 pagesGoogle Self Driving Carmidhun100% (3)
- Self Driving Car (PowerPoint)Document29 pagesSelf Driving Car (PowerPoint)immi19890% (1)
- Autonomous Driving Research ProposalDocument13 pagesAutonomous Driving Research Proposaliwearnexus0% (1)
- Self Driving Cars PDFDocument19 pagesSelf Driving Cars PDFNawfan Nazeer100% (1)
- Self Driving Cars PresentationDocument42 pagesSelf Driving Cars PresentationGeorgia CastoroNo ratings yet
- Master Thesis The Development of Autonomous VehiclesDocument116 pagesMaster Thesis The Development of Autonomous Vehiclescristi_pet4742No ratings yet
- Autonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusDocument56 pagesAutonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusSatyam Agrawal100% (1)
- Documentation of Google Driverless Car 17593Document29 pagesDocumentation of Google Driverless Car 17593Bhargav NanIENo ratings yet
- Frost On LidarDocument30 pagesFrost On Lidarjuan sebastian fragozo villamizar100% (1)
- Dorothyfoltzgra: Introduction To Robotics NikuDocument3 pagesDorothyfoltzgra: Introduction To Robotics NikuManicharanNo ratings yet
- Adaptive Cruise ControlDocument20 pagesAdaptive Cruise ControlMohammad ThanzimNo ratings yet
- Automotive Research HandbookDocument15 pagesAutomotive Research HandbookVinay Nagnath JokareNo ratings yet
- The Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyDocument58 pagesThe Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyMoh. Ali FauziNo ratings yet
- Embedded systems in automobilesDocument17 pagesEmbedded systems in automobilessam clastineNo ratings yet
- Lane Departure Warning SystemDocument128 pagesLane Departure Warning SystemAVINASHNo ratings yet
- AUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsDocument5 pagesAUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsSameer KumthekarNo ratings yet
- Adaptive Cruise ControlDocument25 pagesAdaptive Cruise ControlAnu Prasad100% (1)
- Self Driving Car PDFDocument12 pagesSelf Driving Car PDFRanchuNo ratings yet
- What Is MatlabDocument5 pagesWhat Is Matlabyash143565No ratings yet
- Mech ADAPTIVE CRUISE CONTROLDocument21 pagesMech ADAPTIVE CRUISE CONTROLShashank Ramannavar100% (1)
- Diagnosis For in Vehicle NetworksDocument26 pagesDiagnosis For in Vehicle NetworksSayyedNo ratings yet
- Achieving Complete Autonomy in Self-Driving VehiclesDocument6 pagesAchieving Complete Autonomy in Self-Driving VehiclesSammit NadkarniNo ratings yet
- Model Based Design With Simulation White PaperDocument14 pagesModel Based Design With Simulation White PapersaveNo ratings yet
- Electric Vehicle NotesDocument29 pagesElectric Vehicle NotesVinod BabaleshwarNo ratings yet
- Automotive Radar - From Its Origins To Future DirectionsDocument8 pagesAutomotive Radar - From Its Origins To Future Directionsmadhu_g100% (1)
- Self Driving CarsDocument14 pagesSelf Driving CarsRanchuNo ratings yet
- Artificial Intelligence in Automobiles IndustryDocument6 pagesArtificial Intelligence in Automobiles Industrygaurav jain100% (1)
- Image ProcessingDocument38 pagesImage ProcessingJoy Thakur79% (14)
- VTU Internship Report on 2-Wheeler Electric VehicleDocument45 pagesVTU Internship Report on 2-Wheeler Electric VehicleBR GSKP100% (1)
- Embedded System in AutomobileDocument29 pagesEmbedded System in AutomobileSuMeet Mahapatra100% (1)
- A Case Study On Self Driving CarsDocument5 pagesA Case Study On Self Driving CarsSheldon Kyle Kairuz AbasoloNo ratings yet
- Self-Driving GuidanceDocument36 pagesSelf-Driving GuidanceJohana BhuiyanNo ratings yet
- Automotive Radar Performance CharacteristicsDocument26 pagesAutomotive Radar Performance CharacteristicsChristophe GreffeNo ratings yet
- Radar Presentation From FreescaleDocument34 pagesRadar Presentation From FreescaleGuang ChenNo ratings yet
- 2016 Book AutonomousDrivingDocument698 pages2016 Book AutonomousDrivingfabian_espitia100% (1)
- Adaptive Cruise Control' (ACC)Document30 pagesAdaptive Cruise Control' (ACC)rahulkmar100% (3)
- Autonomous CarDocument28 pagesAutonomous CarNagabhushana0% (1)
- Idiada Sim4u Workshop Motorsport 2010Document108 pagesIdiada Sim4u Workshop Motorsport 2010Cristi AntonNo ratings yet
- VehicleDynamics Compendium 2020Document382 pagesVehicleDynamics Compendium 2020Subramanya MNo ratings yet
- Autonomous Cars 2014 JounalDocument4 pagesAutonomous Cars 2014 JounalmichaelNo ratings yet
- Noise Control in IC EnginesDocument20 pagesNoise Control in IC EnginesClassic PrintersNo ratings yet
- HIL IntroductionDocument13 pagesHIL IntroductionMinh NguyenNo ratings yet
- Embedded System in AutomobilesDocument42 pagesEmbedded System in AutomobilesManpreet SinghNo ratings yet
- Obstacle Avoiding Robot 1920Document13 pagesObstacle Avoiding Robot 1920Abhishek ViraleNo ratings yet
- Automation of Car and Embedded SystemsDocument17 pagesAutomation of Car and Embedded Systemsbalu5475% (4)
- Vehicle DynamicsDocument77 pagesVehicle DynamicsShubham SahaiNo ratings yet
- Seminar Driverless CarDocument35 pagesSeminar Driverless CarChetan Sanikoppa Akkis67% (3)
- Vehicle Dynamics CourseDocument73 pagesVehicle Dynamics CourseGirish ChandranNo ratings yet
- Robot Localization and Map BuildingDocument586 pagesRobot Localization and Map BuildingJosé RamírezNo ratings yet
- 25977-Automobile Sensors May Usher in Self Driving Cars PDFDocument6 pages25977-Automobile Sensors May Usher in Self Driving Cars PDFSandrawarman BalasundramNo ratings yet
- AI in Automotive IndustryDocument1 pageAI in Automotive IndustryAshim RanabhatNo ratings yet
- Automotive Revolution Perspective Towards 2030Document20 pagesAutomotive Revolution Perspective Towards 2030catastroieNo ratings yet
- Autonomous Vehicles-Intelligent Transport Systems and Smart Technologies PDFDocument562 pagesAutonomous Vehicles-Intelligent Transport Systems and Smart Technologies PDFVishnu WishNo ratings yet
- Autonomous Car Seminar ReportDocument34 pagesAutonomous Car Seminar ReportARJUN A RNo ratings yet
- ETHICAL DRILEMMAS OF DRIVERLESS CARSDocument22 pagesETHICAL DRILEMMAS OF DRIVERLESS CARSsubhankar daNo ratings yet
- Driverless CarsDocument22 pagesDriverless CarsMicsku TomiNo ratings yet
- Reference Document-Obstacle Detection System Final ReportDocument17 pagesReference Document-Obstacle Detection System Final ReportNabeel KhanNo ratings yet
- Applying for National Scholarship Portal RenewalDocument1 pageApplying for National Scholarship Portal RenewalNabeel KhanNo ratings yet
- A REVIEW ON MULTI-SEED SOWING MACHINE - Semantic ScholarDocument4 pagesA REVIEW ON MULTI-SEED SOWING MACHINE - Semantic ScholarNabeel KhanNo ratings yet
- CIIIT Plan - ListDocument25 pagesCIIIT Plan - ListNabeel KhanNo ratings yet
- ME Mechanical Engineering Dynamics of Machines Sem-VI NotesDocument4 pagesME Mechanical Engineering Dynamics of Machines Sem-VI NotesNabeel KhanNo ratings yet
- CBSE CTET Admit CardDocument1 pageCBSE CTET Admit CardNabeel KhanNo ratings yet
- 9795-Article Text-36383-3-10-20161004 PDFDocument22 pages9795-Article Text-36383-3-10-20161004 PDFNabeel KhanNo ratings yet
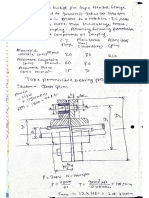
- Design of Bushed pin flexible couplingDocument2 pagesDesign of Bushed pin flexible couplingNabeel KhanNo ratings yet
- CTET July 2020 Application ConfirmationDocument1 pageCTET July 2020 Application ConfirmationNabeel KhanNo ratings yet
- Unit II Productivity IE PDFDocument32 pagesUnit II Productivity IE PDFamy goshNo ratings yet
- 8051 Microcontroller: Unit - 5Document42 pages8051 Microcontroller: Unit - 5Varun Hm ReddyNo ratings yet
- Bushed Pin Type Flexible Coupling NumericalDocument5 pagesBushed Pin Type Flexible Coupling NumericalNabeel KhanNo ratings yet
- 356 SY1tafy PDFDocument21 pages356 SY1tafy PDFNabeel KhanNo ratings yet
- Eighth Semester Syllabus MechDocument25 pagesEighth Semester Syllabus MechNabeel KhanNo ratings yet
- ME504 - Mechanical Measurement: B.E. Mechanical Engineering Sem-VDocument4 pagesME504 - Mechanical Measurement: B.E. Mechanical Engineering Sem-VNabeel KhanNo ratings yet
- Harnessing Hydrogen For Power: Hydrogen CarsDocument18 pagesHarnessing Hydrogen For Power: Hydrogen CarsNabeel KhanNo ratings yet
- VI TH Sem MechanicalDocument15 pagesVI TH Sem MechanicalNabeel KhanNo ratings yet
- Cut Off Report for Integrated Ph D Program DepartmentsDocument1 pageCut Off Report for Integrated Ph D Program DepartmentsNabeel KhanNo ratings yet
- 9084 ErEEFBhDocument13 pages9084 ErEEFBhNabeel KhanNo ratings yet
- Maglev Levitation TrainsDocument23 pagesMaglev Levitation TrainsShreyash SinghNo ratings yet
- The Hydrogen-Wire CarDocument26 pagesThe Hydrogen-Wire CarNabeel KhanNo ratings yet
- Air Car: - Light Utility Vehicles Are Becoming Very Popular Means of Independent TransportationDocument8 pagesAir Car: - Light Utility Vehicles Are Becoming Very Popular Means of Independent TransportationNabeel KhanNo ratings yet
- Report On High-Speed TrainDocument15 pagesReport On High-Speed TrainNabeel KhanNo ratings yet
- Air Car: - Light Utility Vehicles Are Becoming Very Popular Means of Independent TransportationDocument8 pagesAir Car: - Light Utility Vehicles Are Becoming Very Popular Means of Independent TransportationNabeel KhanNo ratings yet
- Maglev Levitation TrainsDocument23 pagesMaglev Levitation TrainsShreyash SinghNo ratings yet
- FMVSS 208 IiDocument122 pagesFMVSS 208 IiKrishna ReddyNo ratings yet
- Productivity Rate Labor EqptDocument31 pagesProductivity Rate Labor Eqptnemat1233No ratings yet
- Parking DesignDocument24 pagesParking DesignJack 'oj' OjukaNo ratings yet
- Everest BrochureDocument4 pagesEverest BrochureMark Chester ShiNo ratings yet
- NHAI Safety Manual PDFDocument239 pagesNHAI Safety Manual PDFSonia MazumderNo ratings yet
- TMP 20364 Asia Pacific Rail 2018 Brochure 114805717Document13 pagesTMP 20364 Asia Pacific Rail 2018 Brochure 114805717jasminetsoNo ratings yet
- Vehicle Dynamics For Racing GamesDocument18 pagesVehicle Dynamics For Racing GamescsorionutNo ratings yet
- Caterpillar cuchilla mototraílla referencia guíaDocument6 pagesCaterpillar cuchilla mototraílla referencia guíaGustavoNo ratings yet
- Lagos Construction Co ListDocument3 pagesLagos Construction Co ListOjo OlukayodeNo ratings yet
- Track Forces and Ballast Lecture 4Document8 pagesTrack Forces and Ballast Lecture 4uhope100% (3)
- URBAN DESIGN - BalajiDocument30 pagesURBAN DESIGN - BalajiAkeel AlawdeenNo ratings yet
- FINAL EXAM IN TRAFFIC MANAGEMENT StudentsDocument7 pagesFINAL EXAM IN TRAFFIC MANAGEMENT StudentsChelsea Salera50% (2)
- 20th Subregional Transport Forum - Summary of ProceedingsDocument379 pages20th Subregional Transport Forum - Summary of ProceedingsAsian Development Bank ConferencesNo ratings yet
- HDive - No Way Out at The EntranceDocument187 pagesHDive - No Way Out at The Entrancejhbuckingham3531No ratings yet
- Urban Design Professional Services Guide 1: NZ Transport Agency Page 1 of 14Document14 pagesUrban Design Professional Services Guide 1: NZ Transport Agency Page 1 of 14suprayitnoNo ratings yet
- Indonesia Off-Road Expedition Scrutineering Check Sheet: Pass FailDocument3 pagesIndonesia Off-Road Expedition Scrutineering Check Sheet: Pass FailMohammad SugengNo ratings yet
- Detailed Project Report for Bypass to Shiradi Ghat NH-48 KarnatakaDocument191 pagesDetailed Project Report for Bypass to Shiradi Ghat NH-48 KarnatakaGANESH KUNJAPPA POOJARINo ratings yet
- Land Rover Range Rover 1998 Owner's ManualDocument211 pagesLand Rover Range Rover 1998 Owner's ManualАлександар РајковскиNo ratings yet
- BEZA Building Act-17Document23 pagesBEZA Building Act-17zakaria200811060No ratings yet
- Challenger 4T: Semi-Synthetic, 4T Motorcycle OilDocument1 pageChallenger 4T: Semi-Synthetic, 4T Motorcycle OilbraduldelamalulmariiNo ratings yet
- Aashto T 250Document13 pagesAashto T 250Alejandra Vélez Mesa100% (3)
- Tata Ace AssignmentDocument5 pagesTata Ace AssignmentSatish Kumar KarnaNo ratings yet
- Economic & Financial Evaluation of Transportation Projects: Prof. S. L. DhingraDocument165 pagesEconomic & Financial Evaluation of Transportation Projects: Prof. S. L. DhingraHemanth GowdaNo ratings yet
- 2021 Road Safety in India Draft1Document75 pages2021 Road Safety in India Draft1amit raviNo ratings yet
- The Border Patrol Ate My Dust by Alicia AlarconDocument209 pagesThe Border Patrol Ate My Dust by Alicia AlarconArte Público PressNo ratings yet
- Jurnal Dani AprizalDocument11 pagesJurnal Dani AprizalDani AprizalNo ratings yet
- Entrance Floor Mats and FramesDocument4 pagesEntrance Floor Mats and FramesAWESDNo ratings yet
- New Possible Corporate List ExlDocument11 pagesNew Possible Corporate List ExlAshishNo ratings yet
- Study of Temperature Differential in Different Concrete Slabs of Varying Slabthickness in Different RegionsDocument9 pagesStudy of Temperature Differential in Different Concrete Slabs of Varying Slabthickness in Different RegionsHashem EL-MaRimeyNo ratings yet
- Jaguar XF BrochureDocument52 pagesJaguar XF BrochureS4m3iXNo ratings yet