You might also like
- 05 A 06 Chapter 3 Uncertaintyv 2Document49 pages05 A 06 Chapter 3 Uncertaintyv 2api-3738694No ratings yet
- CENG 222 Statistical Methods For Computer EngineeringDocument31 pagesCENG 222 Statistical Methods For Computer EngineeringANIL EREN GÖÇERNo ratings yet
- Chapter Test: For B. V. Sc. & A. HDocument41 pagesChapter Test: For B. V. Sc. & A. HKNo ratings yet
- L11a Uncertainty171105Document25 pagesL11a Uncertainty171105Queen Emefa OlivesNo ratings yet
- EPR Paradox, Bell's Inequalities & Quantum Optics ExperimentsDocument9 pagesEPR Paradox, Bell's Inequalities & Quantum Optics ExperimentsChristina Ria ErnawatiNo ratings yet
- Department of Computer Science, CUI Lahore Campus: CSC102 - Discrete Structures by Mahwish WaqasDocument26 pagesDepartment of Computer Science, CUI Lahore Campus: CSC102 - Discrete Structures by Mahwish WaqasSubhan ShahzadNo ratings yet
- Uncertainty InferenceDocument38 pagesUncertainty Inferenceshraddhamore13.smNo ratings yet
- m13 UncertaintyDocument24 pagesm13 UncertaintyKalpana MrcetNo ratings yet
- UncertaintyDocument60 pagesUncertaintyArnab MukherjeeNo ratings yet
- An Introduction To Artificial Intelligence: Chapter 13 &14.1-14.2: Uncertainty & Bayesian NetworksDocument31 pagesAn Introduction To Artificial Intelligence: Chapter 13 &14.1-14.2: Uncertainty & Bayesian NetworksShovon RoyNo ratings yet
- unit 3 MIDocument103 pagesunit 3 MIsharvarictamaneNo ratings yet
- Module No. 05 Uncertain Knowledge and ReasoningDocument14 pagesModule No. 05 Uncertain Knowledge and ReasoningShaza KhotNo ratings yet
- Probability Review GuideDocument33 pagesProbability Review GuideAfsana RahmanNo ratings yet
- Uncertainity MeasureDocument64 pagesUncertainity MeasureNarender NarruNo ratings yet
- Turn in Recitation and Tutorial Scheduling Form Collaboration PolicyDocument3 pagesTurn in Recitation and Tutorial Scheduling Form Collaboration PolicyThắng PyNo ratings yet
- Data Mining – Naive Bayes ClassificationDocument53 pagesData Mining – Naive Bayes ClassificationAndi WijayaNo ratings yet
- Probability: - Formal Study of Uncertainty - The Engine That Drives StatisticsDocument34 pagesProbability: - Formal Study of Uncertainty - The Engine That Drives Statisticsmahmoud fuqahaNo ratings yet
- Review of ProbabilityDocument17 pagesReview of ProbabilityasprillaNo ratings yet
- Turn in Recitation and Tutorial Scheduling Form Policy: TextDocument4 pagesTurn in Recitation and Tutorial Scheduling Form Policy: Textapi-246008426No ratings yet
- Computational Applied Logic: CSC 503 Fall 2005Document77 pagesComputational Applied Logic: CSC 503 Fall 2005Trần Gia LộcNo ratings yet
- Lec 2Document23 pagesLec 2Eric KialNo ratings yet
- Module ADocument43 pagesModule AAnkur MondalNo ratings yet
- 7 UncertaintyDocument13 pages7 UncertaintytanvirNo ratings yet
- Probability and Probability Distributions: Mutually Exclusive and Not Mutually Exclusive EventsDocument9 pagesProbability and Probability Distributions: Mutually Exclusive and Not Mutually Exclusive EventsshivaNo ratings yet
- Chap 2Document15 pagesChap 2triangularedgeNo ratings yet
- 04 - Probability in AIDocument169 pages04 - Probability in AIOmar KhashanNo ratings yet
- AI UncertaintyDocument38 pagesAI UncertaintySirishaNo ratings yet
- Reasoning and Fuzzy LogicDocument51 pagesReasoning and Fuzzy LogicRammah YusufNo ratings yet
- Binomial Distribution & Bayes' TheoremDocument18 pagesBinomial Distribution & Bayes' TheoremnghiasipraNo ratings yet
- Lecture 5Document34 pagesLecture 5Jayaraj JoshiNo ratings yet
- Week 1 AnnotatedDocument95 pagesWeek 1 AnnotatedBobNo ratings yet
- ProbabilityDocument62 pagesProbabilityRajesh Dwivedi100% (1)
- 5 ProbabilitasDocument23 pages5 ProbabilitashermioneNo ratings yet
- Modified Lo-Chau QKD ProtocolDocument5 pagesModified Lo-Chau QKD ProtocolMLhkuNo ratings yet
- Multivariate Models: Introductory Econometrics For Finance' by Dr. Le Trung Thanh 2020 1/67Document67 pagesMultivariate Models: Introductory Econometrics For Finance' by Dr. Le Trung Thanh 2020 1/67Huỳnh Phương Linh TrầnNo ratings yet
- Gustavo Stas PCA GenericDocument52 pagesGustavo Stas PCA GenericMohammad Nahid MiaNo ratings yet
- Statistics: Week 2 Probability Theory. Compulsory Reading: Chapter 16 (Pp. 297 - 318)Document24 pagesStatistics: Week 2 Probability Theory. Compulsory Reading: Chapter 16 (Pp. 297 - 318)Naeem Ahmed HattarNo ratings yet
- Geo Bin and Poiss Distn ProblemsDocument7 pagesGeo Bin and Poiss Distn Problemsshaan76No ratings yet
- 4 THDocument51 pages4 THRahul SoniNo ratings yet
- Lecture Quantifying UncertaintyDocument40 pagesLecture Quantifying UncertaintySACHIN BHAGATNo ratings yet
- Lecture 4: Special Distribution Function & Joint Probability DistributionDocument61 pagesLecture 4: Special Distribution Function & Joint Probability DistributionRahmat JunaidiNo ratings yet
- K - Nearest Neighbours Classifier / RegressorDocument35 pagesK - Nearest Neighbours Classifier / RegressorSmitNo ratings yet
- Basic Statistics: Quantinsti 11 January 2014Document66 pagesBasic Statistics: Quantinsti 11 January 2014johar MohammadNo ratings yet
- Classification and Prediction: Data Mining Concepts and TechniquesDocument18 pagesClassification and Prediction: Data Mining Concepts and TechniquesDimitar GeorgievNo ratings yet
- MA-2203: Introduction To Probability and Statistics: Lecture SlidesDocument64 pagesMA-2203: Introduction To Probability and Statistics: Lecture SlidesGaurav Kumar GuptaNo ratings yet
- MA-2203 Introduction to Probability and Statistics Lecture SlidesDocument81 pagesMA-2203 Introduction to Probability and Statistics Lecture SlidesGaurav Kumar GuptaNo ratings yet
- Chi-Square TestDocument20 pagesChi-Square TestAnoop VishnaniNo ratings yet
- On Probability Theory &stochastic ProcessDocument101 pagesOn Probability Theory &stochastic ProcessmohanNo ratings yet
- Homework 1Document7 pagesHomework 1Muhammad MurtazaNo ratings yet
- Probability Distribution LectureDocument5 pagesProbability Distribution LectureMonir HossainNo ratings yet
- ITS662 Chapter 4 - Bayes TheoremDocument14 pagesITS662 Chapter 4 - Bayes Theoremthegam852No ratings yet
- Chapter 9 Bayes FuzzyDocument70 pagesChapter 9 Bayes FuzzyLe Phu TranNo ratings yet
- IT8601 unitIVDocument47 pagesIT8601 unitIVSmyla LuciaNo ratings yet
- CS340 Machine Learning Information TheoryDocument22 pagesCS340 Machine Learning Information Theorypam6722No ratings yet
- Slides 11 09 PDFDocument105 pagesSlides 11 09 PDFGaurav Kumar GuptaNo ratings yet
- Slides-SkskDocument151 pagesSlides-SkskGaurav Kumar Gupta100% (1)
- Probabilistic ReasoningDocument71 pagesProbabilistic ReasoningAna Laura Malta RendohlNo ratings yet
- FALLSEM2023-24 CSE3013 ETH VL2023240103712 2023-08-01 Reference-Material-IDocument34 pagesFALLSEM2023-24 CSE3013 ETH VL2023240103712 2023-08-01 Reference-Material-Isiddharth guptaNo ratings yet
- Chapter 9Document72 pagesChapter 9JavedNo ratings yet
- Lecture2 Antenna 2009Document16 pagesLecture2 Antenna 2009api-3738694No ratings yet
- Management Assignment 1Document1 pageManagement Assignment 1api-3738694No ratings yet
- The Relational Data Model: Mcgraw-Hill/IrwinDocument44 pagesThe Relational Data Model: Mcgraw-Hill/Irwinapi-3738694No ratings yet
- Chapter02 RevDocument28 pagesChapter02 Revapi-3738694No ratings yet
- Schermerhorn Mgmt9 Ch19Document30 pagesSchermerhorn Mgmt9 Ch19api-3738694No ratings yet
- SCCS453 Course Syllabus 2-2008Document2 pagesSCCS453 Course Syllabus 2-2008api-3738694No ratings yet
- Lect 03Document109 pagesLect 03api-3738694No ratings yet
- Lecture2 NewDocument6 pagesLecture2 Newapi-3738694No ratings yet
- Chap 13 Color Processing V2Document24 pagesChap 13 Color Processing V2api-3738694No ratings yet
- Lecture2 DW ArchitectureDocument44 pagesLecture2 DW Architectureapi-3738694No ratings yet
- Introduction To Internet Technology Gy and Markup LanguagesDocument99 pagesIntroduction To Internet Technology Gy and Markup Languagesapi-3738694No ratings yet
- Schermerhorn Mgmt9 Ch18Document25 pagesSchermerhorn Mgmt9 Ch18api-3738694100% (2)
- Lect 02Document73 pagesLect 02api-3738694No ratings yet
- Lecture3 DW Modeling and OLAP OperationsDocument40 pagesLecture3 DW Modeling and OLAP Operationsapi-3738694No ratings yet
- Lecture1 Overview of DW and DMDocument44 pagesLecture1 Overview of DW and DMapi-3738694No ratings yet
- SCCS 423, Chapter 2Document18 pagesSCCS 423, Chapter 2api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch14Document62 pagesSchermerhorn Mgmt9 Ch14api-3738694100% (1)
- SCCS 423 SCCS 423 Telecommunications: Basic Concepts Basic ConceptsDocument16 pagesSCCS 423 SCCS 423 Telecommunications: Basic Concepts Basic Conceptsapi-3738694No ratings yet
- Schermerhorn Mgmt9 Ch12Document38 pagesSchermerhorn Mgmt9 Ch12api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch13Document48 pagesSchermerhorn Mgmt9 Ch13api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch16Document56 pagesSchermerhorn Mgmt9 Ch16api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch17Document43 pagesSchermerhorn Mgmt9 Ch17api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch15Document28 pagesSchermerhorn Mgmt9 Ch15api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch11Document47 pagesSchermerhorn Mgmt9 Ch11api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch09Document48 pagesSchermerhorn Mgmt9 Ch09api-3738694100% (1)
- Schermerhorn Mgmt9 Ch10Document55 pagesSchermerhorn Mgmt9 Ch10api-3738694100% (1)
- Schermerhorn Mgmt9 Ch07Document43 pagesSchermerhorn Mgmt9 Ch07api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch03Document33 pagesSchermerhorn Mgmt9 Ch03api-3738694No ratings yet
- Schermerhorn Mgmt9 Ch04Document30 pagesSchermerhorn Mgmt9 Ch04api-3738694100% (1)
- Schermerhorn Mgmt9 Ch02Document36 pagesSchermerhorn Mgmt9 Ch02api-3738694100% (4)
- Guideline - Research ProposalDocument38 pagesGuideline - Research ProposalRASNo ratings yet
- Q #1 Facilitating Learner-Centered TeachingDocument1 pageQ #1 Facilitating Learner-Centered Teachinglaica andal100% (1)
- Alvesson 2003Document22 pagesAlvesson 2003Geovane Sousa100% (1)
- Four Theories Regarding Dependence of Thought and Culture On LanguageDocument1 pageFour Theories Regarding Dependence of Thought and Culture On Languagetapdew 25No ratings yet
- Prosocial BehaviorDocument37 pagesProsocial Behaviorxerah0808No ratings yet
- Humanistic Theories of NsgorganizationsDocument15 pagesHumanistic Theories of NsgorganizationsYnaffit Alteza UntalNo ratings yet
- Ernst W. Mayr - This Is Biology - The Science of The Living World-Belknap Press (1998) PDFDocument356 pagesErnst W. Mayr - This Is Biology - The Science of The Living World-Belknap Press (1998) PDFDimitris KatsidoniotisNo ratings yet
- Nursing Practice Is Based and Provides The Foundation For Understanding Theory As One Type of Nursing KnowledgeDocument32 pagesNursing Practice Is Based and Provides The Foundation For Understanding Theory As One Type of Nursing Knowledgeyousuf pogiNo ratings yet
- Political ScienceDocument35 pagesPolitical ScienceZimm Basubas100% (2)
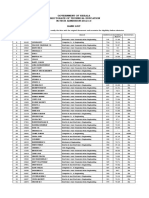
- Government of Kerala Directorate of Technical Education M.TECH ADMISSION 2012-13 Rank ListDocument126 pagesGovernment of Kerala Directorate of Technical Education M.TECH ADMISSION 2012-13 Rank ListMidhun MuraliNo ratings yet
- Qualitative Research An Introduction Jonathan H DeaconDocument51 pagesQualitative Research An Introduction Jonathan H DeaconShripad KattiNo ratings yet
- Lec 2 - Quali Vs QuantiDocument21 pagesLec 2 - Quali Vs QuantiTrish GerongNo ratings yet
- Reserts PDFDocument3 pagesReserts PDFDelilah DynNo ratings yet
- Science, Technology, and Society (STS) Hand-Out#6: Human FlourishingDocument5 pagesScience, Technology, and Society (STS) Hand-Out#6: Human FlourishingKclyn Remolona100% (1)
- CEE320 Report Format-1Document3 pagesCEE320 Report Format-1kanielafinNo ratings yet
- Context Is Fundamental To Discourse AnalysisDocument3 pagesContext Is Fundamental To Discourse AnalysisBahawalpur 24/7No ratings yet
- The Innatist Theory: A Brief OverviewDocument2 pagesThe Innatist Theory: A Brief OverviewEman Elturki95% (20)
- Introducing Stylistics 1Document25 pagesIntroducing Stylistics 1Bimbola Idowu-FaithNo ratings yet
- Senior High School (SHS) 11 & 12 Mr. Alvin J. Sumampong, MA Mrs. Myrna D. Ariar, Mr. Walter Andit Mr. Frank Nicole Marba Ms. Mila Rose Vicente Practical Research 1Document3 pagesSenior High School (SHS) 11 & 12 Mr. Alvin J. Sumampong, MA Mrs. Myrna D. Ariar, Mr. Walter Andit Mr. Frank Nicole Marba Ms. Mila Rose Vicente Practical Research 1Jojames GaddiNo ratings yet
- Makalah Discourse AnalysisDocument10 pagesMakalah Discourse AnalysisFadly Kurozaky67% (3)
- Chapter 5Document20 pagesChapter 5Loreth Aurea OjastroNo ratings yet
- Advantages and Disadvantages of ObservationDocument3 pagesAdvantages and Disadvantages of ObservationReymond NicolasNo ratings yet
- Models of Reflection: Reflection in Nursing and The Helping Professions: A User's Guide. Basingstoke. Palgrave MacmillanDocument5 pagesModels of Reflection: Reflection in Nursing and The Helping Professions: A User's Guide. Basingstoke. Palgrave MacmillanRoy BryanNo ratings yet
- Problem StatementsDocument5 pagesProblem StatementsAlexandre David BotavaraNo ratings yet
- How Linguistics Is The Scientific Study of LanguageDocument4 pagesHow Linguistics Is The Scientific Study of LanguageAftab Ali KhaskheliNo ratings yet
- 2019 Inductive Versus Deductive Teaching MethodsDocument21 pages2019 Inductive Versus Deductive Teaching MethodsAlanFizaDaniNo ratings yet
- Key Issues Faculty Website " ": English Legal MethodsDocument16 pagesKey Issues Faculty Website " ": English Legal MethodsVictor Wei0% (1)
- Cognitive Processes and Expert SystemsDocument12 pagesCognitive Processes and Expert Systemsjohnmauro alapagNo ratings yet
- Introduction to Validity, Reliability and Their EstimationDocument6 pagesIntroduction to Validity, Reliability and Their EstimationWinifridaNo ratings yet
- How Innatism Shapes Language Learning and TeachingDocument35 pagesHow Innatism Shapes Language Learning and TeachingWatcharee Wongthanet100% (1)