You might also like
- 14 Interpolation DecimationDocument32 pages14 Interpolation DecimationSanjay BalwaniNo ratings yet
- Ramadasu Keerthanas E Teeruga Nanu Daya Choochedavo TeluguDocument1 pageRamadasu Keerthanas E Teeruga Nanu Daya Choochedavo TelugusrinivasNo ratings yet
- Chapter 8 - Cmos ComparatorsDocument39 pagesChapter 8 - Cmos Comparatorsfabio-delima8012100% (1)
- Rs 100 Note AffidavitDocument22 pagesRs 100 Note AffidavitParthasarathy SarathyNo ratings yet
- LuminescenceandtheSolidState PDFDocument731 pagesLuminescenceandtheSolidState PDFolbapinNo ratings yet
- Palladium CryptographyDocument22 pagesPalladium Cryptographyglucifer100% (2)
- ADA Lab Manual - AnujJain ITM Universe VadodaraDocument74 pagesADA Lab Manual - AnujJain ITM Universe VadodaraanujgitNo ratings yet
- Markandeya PuranamDocument25 pagesMarkandeya Puranamelitesree123No ratings yet
- Everything You Need to Know About Shaping Machines and Scotch Yoke MechanismsDocument36 pagesEverything You Need to Know About Shaping Machines and Scotch Yoke Mechanismsvijay vijay33% (3)
- Chandamama 2007 4 PDFDocument63 pagesChandamama 2007 4 PDFravi kumar paturuNo ratings yet
- Eee Vi Embedded Systems (10ee665) Question PaperDocument4 pagesEee Vi Embedded Systems (10ee665) Question PapersanjaliNo ratings yet
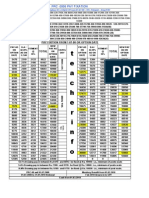
- PRC-08 Pay Fixation @39% FitmentDocument1 pagePRC-08 Pay Fixation @39% Fitmentnavn76No ratings yet
- Kushal Kushal Tractors TractorsDocument12 pagesKushal Kushal Tractors TractorsMourya kanthNo ratings yet
- Savita Bhabi Kannada Bra Salesman SlideDocument2 pagesSavita Bhabi Kannada Bra Salesman Slideanon_9872930% (2)
- TTD Calendar 2021 PDFDocument13 pagesTTD Calendar 2021 PDFVishwas Shetty64% (11)
- Online windPRO Course USDDocument1 pageOnline windPRO Course USDmcelecele100% (1)
- JIPMER MD MS Merit ListDocument205 pagesJIPMER MD MS Merit ListAnweshaBoseNo ratings yet
- Java Hackerrank SolutionsDocument25 pagesJava Hackerrank Solutions21CS055 HARINI SNo ratings yet
- Eenadu Prathibha General StudiesDocument10 pagesEenadu Prathibha General StudiesDevela AvinashNo ratings yet
- Andhra Pradesh Education Act, 1982Document213 pagesAndhra Pradesh Education Act, 1982RICHA SINGH100% (2)
- Switched - Capacitor by Ken MartinDocument30 pagesSwitched - Capacitor by Ken MartinSumeet SauravNo ratings yet
- M.tech Mid Question Paper CPLD & FpgaDocument2 pagesM.tech Mid Question Paper CPLD & Fpgakanavath100% (3)
- Äœá Á™Ã Á Sita Bolt: PDF Created With Fineprint Pdffactory Pro Trial VersionDocument11 pagesÄœá Á™Ã Á Sita Bolt: PDF Created With Fineprint Pdffactory Pro Trial VersionRamji RaoNo ratings yet
- Polytechnic Entrance Exam (CEEP-2009) Question & Answer Key PaperDocument15 pagesPolytechnic Entrance Exam (CEEP-2009) Question & Answer Key PaperMruthyunjayNo ratings yet
- S&S Previous Question PapersDocument75 pagesS&S Previous Question PapersAllanki Sanyasi RaoNo ratings yet
- EtlumeevidheyuduDocument667 pagesEtlumeevidheyuducreateriNo ratings yet
- Pond Ash ConcreteDocument23 pagesPond Ash ConcreteSharath M Sukruth100% (1)
- Google Pagerank and Reduced-Order ModellingDocument56 pagesGoogle Pagerank and Reduced-Order ModellingPavan KumarNo ratings yet
- Daridraya Dahana Shiva Stotram Telugu PDF File1624Document2 pagesDaridraya Dahana Shiva Stotram Telugu PDF File1624వన మాలి50% (4)
- Shakeela Telugu Movie Kameswari DownloadDocument3 pagesShakeela Telugu Movie Kameswari Downloadవడ్ల వినయ్ కుమార్ చారిNo ratings yet
- List of Human Relationships Vocabulary ... Hindi & TeluguDocument10 pagesList of Human Relationships Vocabulary ... Hindi & TeluguvarshneyrajeNo ratings yet
- Bulli Bala SikshaDocument37 pagesBulli Bala SikshagchilukuriNo ratings yet
- Hanuman ChalisaDocument50 pagesHanuman ChalisabharathNo ratings yet
- OracleDocument109 pagesOracleVenkat GowdaNo ratings yet
- SriManikyaCharitamrutham PDFDocument318 pagesSriManikyaCharitamrutham PDFjagan1978No ratings yet
- Fire Alarm System MonitoringDocument56 pagesFire Alarm System MonitoringRagini GudelliNo ratings yet
- Vishnu Sharma English ChaduvuDocument128 pagesVishnu Sharma English Chaduvusrikalyani2k9No ratings yet
- Hot-Indian-Telugu-Stories-01: Contributed byDocument40 pagesHot-Indian-Telugu-Stories-01: Contributed byfiroz automationNo ratings yet
- 107-Engineering Mechanics: Home Assignment: FrictionDocument2 pages107-Engineering Mechanics: Home Assignment: Frictionsexyguy24No ratings yet
- Notification For General Recruitment UCEK JNTUKDocument33 pagesNotification For General Recruitment UCEK JNTUKpragatinaresh100% (1)
- Monthly Assessment Cards AllDocument9 pagesMonthly Assessment Cards AllRed Leaf EntertainmentNo ratings yet
- Thermal Management of Electronics Using Ansys IcepakDocument31 pagesThermal Management of Electronics Using Ansys Icepakche.amit3608No ratings yet
- Pratistapana 2Document1 pagePratistapana 2api-19787949No ratings yet
- Sap Abap MaterialDocument196 pagesSap Abap MaterialKumar Krishna KumarNo ratings yet
- DiwipDocument3 pagesDiwipSuma Madhu0% (1)
- A. H. Kitai (Auth.), A. H. Kitai (Eds.) - Solid State Luminescence - Theory, Materials and Devices-Springer Netherlands (1993)Document388 pagesA. H. Kitai (Auth.), A. H. Kitai (Eds.) - Solid State Luminescence - Theory, Materials and Devices-Springer Netherlands (1993)Ica AQ100% (1)
- Page 1 of 2 document summaryDocument2 pagesPage 1 of 2 document summaryraj_prkNo ratings yet
- (2003) - Wiley - Uml BibleDocument913 pages(2003) - Wiley - Uml BibleDocanNo ratings yet
- September 2017 Abhisarika OptDocument42 pagesSeptember 2017 Abhisarika Optpoosha5700No ratings yet
- AnnavaramDocument3 pagesAnnavaramJay Jayavarapu0% (1)
- VLSI Layout Compaction TechniquesDocument22 pagesVLSI Layout Compaction TechniquesshankarNo ratings yet
- Module 2 - VlsiDocument36 pagesModule 2 - VlsiMegha ShreeNo ratings yet
- Steiner RoutingDocument85 pagesSteiner RoutingMaanit MehraNo ratings yet
- Dr. Abhijit R Asati EEE Department, BITS, PilaniDocument22 pagesDr. Abhijit R Asati EEE Department, BITS, PilaniNeha PachauriNo ratings yet
- Physical Design - Overall FlowDocument40 pagesPhysical Design - Overall Flowshabbir470No ratings yet
- Graphs: Representation, Traversal, Shortest PathsDocument71 pagesGraphs: Representation, Traversal, Shortest Pathsazer elsaiedNo ratings yet
- Data Structure: (Algorithms For Weighted Graphs)Document22 pagesData Structure: (Algorithms For Weighted Graphs)Betemariam AssaminewNo ratings yet
- INF280 Graph Traversals & Paths: Florian Brandner February 27, 2018Document21 pagesINF280 Graph Traversals & Paths: Florian Brandner February 27, 2018Wantei Kupar WarjriNo ratings yet
- Graph AlgorithmDocument44 pagesGraph AlgorithmAlfian Aji WahyudiNo ratings yet
- Bellman-Ford Algorithm - DP-23: Recommended: Please Solve It On "PRACTICE " First, Before Moving On To The SolutionDocument3 pagesBellman-Ford Algorithm - DP-23: Recommended: Please Solve It On "PRACTICE " First, Before Moving On To The SolutionPrashant KulkarniNo ratings yet
- VHDL & Digital Circuit DesignDocument32 pagesVHDL & Digital Circuit DesignkumarbsnspNo ratings yet
- Technology of RocketDocument29 pagesTechnology of RocketkumarbsnspNo ratings yet
- The WIREsDocument32 pagesThe WIREskumarbsnsp100% (1)
- Multi Chip Module1Document17 pagesMulti Chip Module1kumarbsnsp0% (1)
- NoiseDocument33 pagesNoisekumarbsnspNo ratings yet
- Designing of Combinational Logic Gates in Cmos: G.Susmitha Roll No:06Document49 pagesDesigning of Combinational Logic Gates in Cmos: G.Susmitha Roll No:06kumarbsnspNo ratings yet
- Perl, A Hardware LanguageDocument53 pagesPerl, A Hardware LanguagekumarbsnspNo ratings yet
- Image Enhancement in The Spatial Domain1Document54 pagesImage Enhancement in The Spatial Domain1kumarbsnspNo ratings yet
- Design and Fast Implementation of G726 ADPCM Codec For Audio and Speech ApplicationsDocument20 pagesDesign and Fast Implementation of G726 ADPCM Codec For Audio and Speech Applicationskumarbsnsp0% (3)
- FinfetDocument25 pagesFinfetkumarbsnsp89% (9)
- Image Enhancement in The Spatial Domain2Document60 pagesImage Enhancement in The Spatial Domain2kumarbsnspNo ratings yet
- Cmos InvDocument25 pagesCmos InvkumarbsnspNo ratings yet
- Faults in Digital Testing SystemsDocument30 pagesFaults in Digital Testing SystemskumarbsnspNo ratings yet
- Hazard and GlitchesDocument22 pagesHazard and GlitcheskumarbsnspNo ratings yet
- Development of CPLD Based Memory Controller For MPC 603E PPC Based Single Board ComputerDocument38 pagesDevelopment of CPLD Based Memory Controller For MPC 603E PPC Based Single Board ComputerkumarbsnspNo ratings yet
- Arithmetic CircuitsDocument38 pagesArithmetic CircuitskumarbsnspNo ratings yet
- Clocking in Digital SystemsDocument28 pagesClocking in Digital SystemskumarbsnspNo ratings yet
- Clock Dividers Made EasyDocument25 pagesClock Dividers Made Easykumarbsnsp100% (2)
- Bandgap ReferencesDocument18 pagesBandgap ReferenceskumarbsnspNo ratings yet
- Advt 02012012Document17 pagesAdvt 02012012Mukesh Kumar ChandNo ratings yet
- Algorithmic Graph TheoryDocument26 pagesAlgorithmic Graph TheorykumarbsnspNo ratings yet
- Analog To Digital Converter in Wireless Local Area NetworkDocument29 pagesAnalog To Digital Converter in Wireless Local Area Networkkumarbsnsp0% (1)
- An Efficient Methodology For Achieving Optimal Power and Speed in AsicDocument22 pagesAn Efficient Methodology For Achieving Optimal Power and Speed in Asickumarbsnsp50% (2)
- Data Struct Assgn19Document25 pagesData Struct Assgn19Namish DevarajNo ratings yet
- DijkstraShortestPath (Jung2 2.0 API)Document2 pagesDijkstraShortestPath (Jung2 2.0 API)daniele4neNo ratings yet
- HW 6Document4 pagesHW 6api-479531624No ratings yet
- 1 Cheatsheet: Leetcode Common Templates & Common Code Problems InterviewDocument8 pages1 Cheatsheet: Leetcode Common Templates & Common Code Problems InterviewvarshiNo ratings yet
- Floyd's Algorithm: All Pairs Shortest PathDocument23 pagesFloyd's Algorithm: All Pairs Shortest PathAshutosh UpadhyayNo ratings yet
- DAA - Shortest Paths - TutorialspointDocument5 pagesDAA - Shortest Paths - TutorialspointUsama ArifNo ratings yet
- Dijkstra's AlgorithmDocument16 pagesDijkstra's AlgorithmAndrei NecuţăNo ratings yet
- Dies TelDocument28 pagesDies TelAtique KhattakNo ratings yet
- Dijkestra Algorithm PPT L-20Document19 pagesDijkestra Algorithm PPT L-20Saket AnandNo ratings yet
- Algorithms Question BankDocument15 pagesAlgorithms Question BankPablo AhmedNo ratings yet
- Design and Analysis of Algorithm - QBDocument14 pagesDesign and Analysis of Algorithm - QBAkshay PawarNo ratings yet
- Design and Analysis of Algorithms Lab Manual (18CSL47Document56 pagesDesign and Analysis of Algorithms Lab Manual (18CSL47Rakshitha MN gowdaNo ratings yet
- Graph Theory Explained With ExamplesDocument3 pagesGraph Theory Explained With ExamplesPKDiannaNo ratings yet
- Dsa Viva QuestionsDocument18 pagesDsa Viva QuestionsSwarali UtekarNo ratings yet
- 7 GraphsDocument39 pages7 GraphsSomaiah SulaimanNo ratings yet
- Greedy AlgorithmDocument40 pagesGreedy AlgorithmPRAVINITNo ratings yet
- Graphs in Data Structure Using C ProgrammingDocument79 pagesGraphs in Data Structure Using C ProgrammingKaran RoyNo ratings yet
- User Manual IgraphDocument431 pagesUser Manual IgraphNetworksNo ratings yet
- Daa ProblemsDocument17 pagesDaa ProblemsPavan ShanbhagNo ratings yet
- Divide and Conquer Algorithm Analysis for Maximum and Minimum ValuesDocument32 pagesDivide and Conquer Algorithm Analysis for Maximum and Minimum Valuesgoyalsb2682No ratings yet
- Graphs in Sage MathDocument874 pagesGraphs in Sage Mathelham100% (1)
- Bellman Ford Algorithm PDFDocument15 pagesBellman Ford Algorithm PDFSayednowroz SayedyNo ratings yet
- ArangoDB PDF Submission Handling Billions of Edges in A Graph DatabaseDocument27 pagesArangoDB PDF Submission Handling Billions of Edges in A Graph Databasearangodb448No ratings yet
- DM Lec 12 ShortDocument52 pagesDM Lec 12 ShortNicNo ratings yet
- Unit Iv Non Linear Data Structures - GraphsDocument29 pagesUnit Iv Non Linear Data Structures - GraphsRekhasreeGoneNo ratings yet
- Quick Sort and Merge Sort Algorithms ExplainedDocument90 pagesQuick Sort and Merge Sort Algorithms ExplainedGayatri JethaniNo ratings yet
- A4 SolutionDocument3 pagesA4 SolutionSarvesh MehtaNo ratings yet
- Programming Homework HelpDocument9 pagesProgramming Homework HelpProgramming Homework HelpNo ratings yet
- Rump Jalan TambangDocument9 pagesRump Jalan TambangAndre AlistinNo ratings yet